View allAll Photos Tagged Bayesian
Sur la jetée du port de plaisance de San Nicola. Dernièrement c'est dans cette baie, au large de Termini Imerese, que le Bayesian, le Yacht du milliardaire Mike Lynch a sombré.
Panorama da Capo Zafferano a Porticello - Area archeologica di Solunto, Santa Fliavia (Pa) - Si noti la piattaforma per le operazioni di recupero dello Bayesian, superyacht affondato all'alba del 19 agosto 2024 al largo di Porticello, frazione del comune siciliano di Santa Flavia.
Uncertainty for 2021... Can beauty be ugly? Can ugly be beautiful? Are we in a Bayesian renaissance or a plunge into white noise?
When most people think of highly venomous and potent snakes throughout the western states, they might first think of the bold and respectable rattlesnake, however a far more potent and secretive species lurks within the underbrush. This is the Texas coralsnake, one of three elapids found in North America and also one of the most potent snakes in the country.
Equipped with a deadly neurotoxin and myotoxin, this snake is easily able to dispatch a wide assortment of prey, including rattlesnakes.
People are quick to state that there is no antivenom available to treat the venom of these snakes, and while this is true, most people overlook the reason behind this. Production of antivenom to treat coralsnake bites was considered to be a loss of profit for the manufactures due to the fact that people almost never get bitten by these snakes.
These snakes are incredibly secretive and are quite reluctant to bite and only do so if absolutely necessary. This individual did not pose a threat whatsoever and I felt very comfortable in its 3 foot presence despite it packing a bite that could easily dispatch me.
Porticello da Solunto (Pa) - Area archeologica di Solunto, Santa Fliavia (Pa) - Si noti la piattaforma per le operazioni di recupero dello Bayesian, superyacht affondato all'alba del 19 agosto 2024 al largo di Porticello, frazione del comune siciliano di Santa Flavia.
Jieshu has come from China to study mathematics in Finland. She has been living here for the past five years.
(University of Helsinki, Maths and stats Department, Graduate Student. Studies Decision Analysis, Bayesian statistics, and Philosophy.)
When I stopped her to ask whether I might make a photo of her, she was so surprised.
"I am so flattered," she said, "this has never happened to me !"
± :: [theorems] :: bayes' theorem - beliefs and degrees of uncertainty
a bright red square
yet what we see
is the little white smear, no?
La cronaca a volte ha aspetti curiosi, alcuni saranno chiariti, altri rimarranno per i più nell'oscurità per sempre.
Vista la poppa e la prua con le loro caratteristiche (Perini Navi Viareggio) è stato subito chiaro che questa barca l'avevo già vista un po' di anni fa.
Dai viali a mare quardando verso il porto di Viareggio si vedeva il gigantesco albero del Salute svettare e di parecchio sopra tutti gli altri.
Nel tempo un paio di ristrutturazioni e un cambio di nome.... con poca fortuna.
Mai cambiare il nome a una barca.
Bayesian inference for spatio-temporal spike and slab priors. Andersen, Vehtari, Winther, Hansen arxiv.org/abs/1509.04752 #stat
Bayesian inference for spatio-temporal spike and slab priors. Andersen, Vehtari, Winther, Hansen arxiv.org/abs/1509.04752 #stat
The wasp moths are moths that mimic wasps in order to scare predators away. A classic case of Bayesian Mimicry.
Maths in neon at Autonomy in Cambridge. This is Bayes's Theorem, relating the probability of A given B to B given A.
This image is used on the Philosopher, Psychologist, Plasterer blog paul-david-robinson.com/post/5129596878/the-philosophy-of... in an article "The Philosophy of Physics". It was also used on the Wikipedia article for Bayes Theorem.
It was further used on a Spanish blog profeblog.es/blog/luismiglesias/2010/01/02/fotografia-mat...
It was later used in a father's blog post about having twin girls - www.bigdansramblings.com/2012/03/30/phases-finding-twin-g... - congratulations mate.
It is also used on a blog article about Stanford offering a statistics in medicine course - scopeblog.stanford.edu/2013/05/28/stanford-offers-free-st...
And an article "Signal, Noise and Clinical Trials" - lacertabio.com/2013/04/signal-noise-and-clinical-trial-re...
And a review of an elementary statistics course. moocnewsandreviews.com/course-review-elementary-statistic...
And the front page of a wiki about Probabilistic Programming for Advancing Machine Learning (whatever that is) - ppaml.galois.com/wiki/
And an LSE blog post about citations: "A Bayesian approach to the REF: finding the right data on journal articles and citations to inform decision-making." blogs.lse.ac.uk/impactofsocialsciences/2013/12/02/journal...
And an Italian site "Rebel Fitness". Not sure why, I assume it just looked mathematical. www.fitnessribelle.it/alimentazione/calcolo-calorie/
And a blog about the emotional state of being an entrepreneur - www.ecosystemsandentrepreneurs.com/blog/2015/4/3/the-emot...
And a Strangeloop presentation about probability. www.youtube.com/watch?v=MiiWzJE0fEA
An article about Bayesian logic in Python. machinelearningmastery.com/naive-bayes-classifier-scratch...
"
Bayes’s Theorem & Naïve Bayes Classifiers " dem1995.github.io/machine-learning/extra_pages/naive_baye...
Needle and thread? Check!
Ruler and pencil? Check!
Space and Time? Check!
Eye and Lens? Check!
...
...compiling.
Lottery with lumbers. The French Lottery used to have "100% of the winners have bet" in the ads, proving that no matter how enlightening Bayesian probabilities may be, they are also a wonderful too to mislead the public.
Asahi Pentax Spotmatic F & Takumar 35mm f/3.5, Kodak Gold 200 developped using the Rollei C1 kit at 100°F (dev. time more like 3'50" than the recommended 3'15"), digitalized using kit zoom with macro rings.
Thank you everyone for your visits, faves and comments, they are always appreciated :)
Non parametric Bayesian approach to LR assessment in case of rare haplotype match. Cereda arxiv.org/abs/1506.08444 #stat
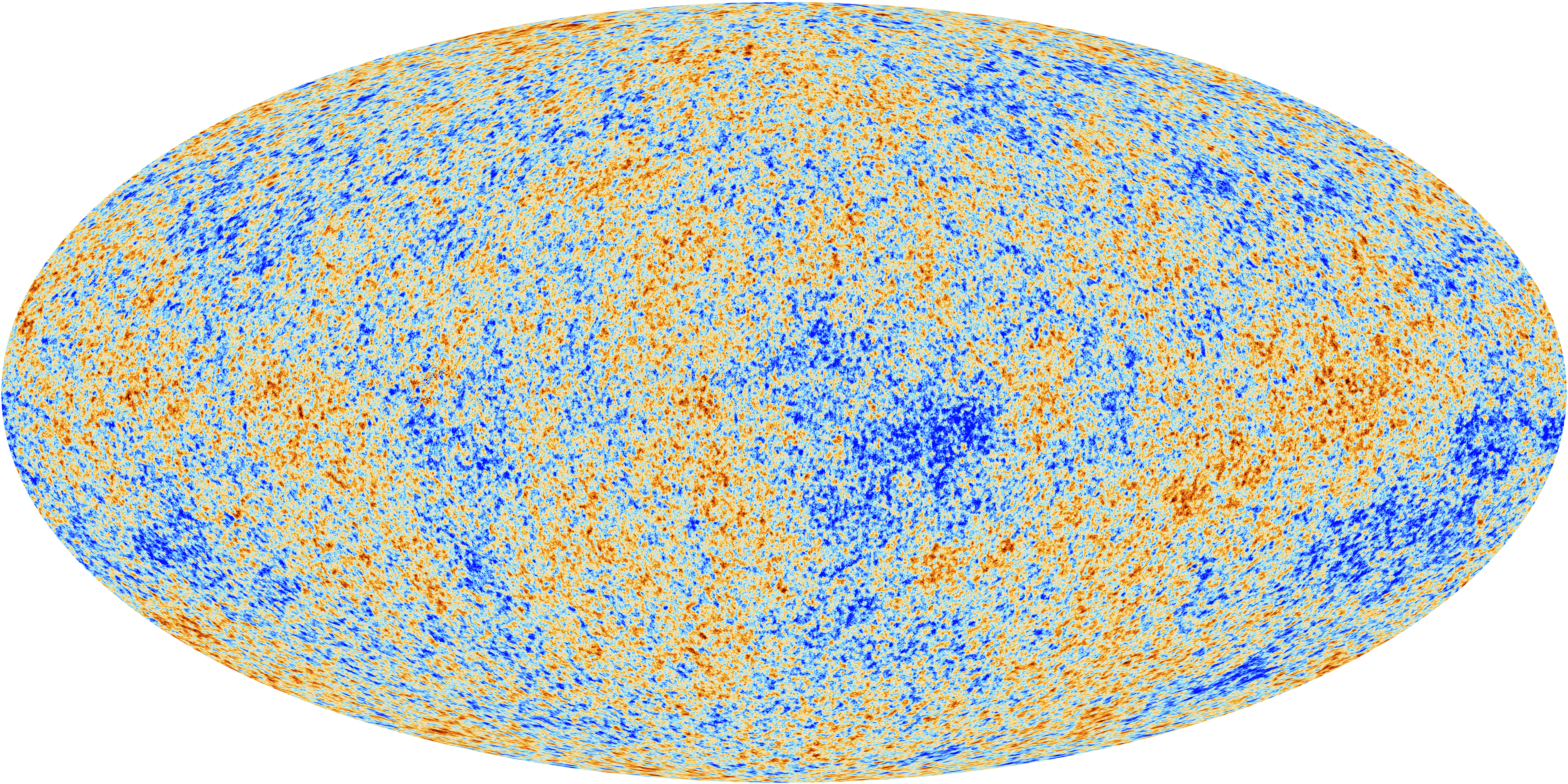
The above top two images are pictures of cosmic background radiation, one provided the Wilkinson Microwave Anisotropy Probe (WMAP) and the second from top, a more recent image, is from the Planck probe in even higher resolution. WMAP and Planck were small spacecraft equipped with microwave telescopes, or receivers, sent out into deep space by NASA and the European Space agency respectively. The bottom two images show how the visual field is construed from two overlapping monocular fields (‘Visual Field’, n.d.), and a representation of my subjective visual field as I watch a detail from Van Gogh's Starry Night, complete with the occluding nose(s).
{kind=link}
Recently, over the past 10 years, increasing evidence has been found that there are a number of anomalies in the cosmic background radiation that deviate, in structured ways, from a random (Gaussianly) distributed universe (see Trosper, 2014, for an excellent layman's introduction).
The universe appears to have a preferred alignment with which even our solar system conforms (Huterer, 2007). Groeneboom and Eriksen's (2009; see also Carroll, n.d.) analysis of the US WMAP data found two poles (shown as red dots in the image second from top).
More recent analyses of WMAP and Planck space probe data have found an jokily named "axis of evil" (Land & Magueijo, 2005; Aron, Jacob, 2013) which is shown in the second image above as a white line through the cosmic background radiation data. On each side of this axis there are statistically significant asymmetries in overall temperature (Yoho, Copi, Starkman, & Kosowsky, 2014), quasar light polarisation (Hutsemekers, 2014, slide 53-56), and right/left galaxy spin (Longo, 2007, 2008) prompting the latter author to suggest that the universe has a "handedness" about this "axis".
Since the WMAP and Planck probe data correspond with each other, even though collected from difference coordinates in different ways, it is unlikely that this is some "foreground" distortion produced by the measurement apparatus, or local interference such as the effect of our sun. This article will argue that the previous research has not considered the "foreground" at close-quarters enough.
These anomalies have seriously challenged the way that physicists see the universe, prompting one team to ask "Is everything we know about the universe wrong?" (Sawangwit & Shanks, 2010).
(Skip this bit till the line of asterisks ********** if you have read my other posts on this topic )
As already discussed, Ernst Mach, as well as Buddhist philosophers and Aristotle, have hypothesised that the stuff of the universe is our sensations (mind, soul) and specifically our visual field (Mach, 1897). According to this view, "things", "matter", "galaxies", "particles" are the theories and hypotheses that we have to explain sensations.
After reading Mach's phenomenalism, and the closely related Humian empiricism, Einstein postulated his theory of special relativity and the principle of invariant light speed (see Norton, 2010). As a consequence, there is a prohibition of motion faster than light. That the speed limit of the whole universe just so happens to be that of the fastest sense of recently evolved carbon based life form called "humans" on a cosmic speck called "the Earth" is no coincidence. This fortuitousness - which would otherwise be preposterous -- can easily be explained from a Machian holistic perspective (Takemoto, 2014). If the stuff of the universe is our sensations, then it is a tautology that nothing can go faster than the speed of our fastest sensation, light. As an interpretation of our visual field, the universe is of course made of this "light". Phenomenalist, empiricist reasoning of this type be used to explain other properties of the universe.
Particularly, (as discussed here) recent advances in string theory have suggests that the universe is flat, or "holographic," (Susskind, 1995) again, as is our visual field. The hypothesis that we live in a holograph is now being tested by the Fermi lab (Hogan, 2013) and the results are expected soon, but the fact that the universe is within 0.4% of flat has already by demonstrated by the WMAP CBR data (NASA/WMAP Science Team, 2012). If the universe is genuinely flat and three dimensionality an "emergent property" then for me this can not be explained in any non-Machian way: a flat "holographic universe" can only be an interpretation of our, human sensations. But there is still more evidence.
Still more recent research to explain the anomalies in the Cosmic Background Radiation data suggest that one way of of explaining some of the anomalies is to conclude that the universe is not spherical but ellipsoidal (Campanelli, Cea, Fogli, & Tedesco, 2011; Cea, 2014, see my earlier post). This theory does not seem to have caught on because physicists -- still convinced of a "The Matrix"-like, Kantian 'real world' out there, behind appearances, I presume -- can see no explanation as to why the universe should be elliptical. NASA astrophysicist Gary Hinshaw is quoted as saying, "It is actually difficult to understand how an ellipsoidal model would arise 'naturally' in cosmology, so the burden switches from explaining a very mild 'anomaly' to explaining a fundamentally new feature of our universe,"(Choi, Charles, Q, 2006).
*******************************************************************************
If the "universe" is our interpretation of our sensations and in particular the visual field, that vast ellipse of light that we find before (or engulfing) us, then it seems appropriate that the theory and data regarding the universe should conform to the subjective experience shown in the bottom image. Van Gogh's swirls suggest that he may have been able to see asymmetries in his visual perception. I am subjectively unaware of them, but research on visual perception demonstrates that such asymmetries exist.
I suggest therefore, that the anomalies in the cosmic background radiation data may be explained by consideration of asymmetries of the human visual field and visual cortex. Our visual field is formed from the unification of two roughly circular monocular two dimensional fields which means that is approximately elliptical.
Furthermore, it has been known for some time to psychologists and neuroscientists that there the visual field has horizontal and vertical asymmetric properties. For example there is left-right asymmetry in the processing of local and global visual information. Navon figures such as that below
T
T
T
T
T T T T
are processed faster globally (as in this case an L) in the left visual field and processed faster locally (as in the above case as a T) in the right visual field (Yovel, Yovel, & Levy, 2001; McKone et al., 2010).
This asymmetry in local and global processing parallels asymmetries in low versus high visuo-spatial frequency. "Spatial frequency refers to the number of dark-light cycles per unit of space - the more cycles per unit of space, the higher the spatial frequency (Hellige, 1996, p487)."
There are also differences in visual processing between the upper and lower parts of the human visual field (Genzano, Di Nocera, & Ferlazzo, 2001).
These vertical asymmetries sometimes match those found in the left-right asymmetry (e.g. Christman, 1993) where recognition of local features (the Ts in the above) of Navon figures is better in the upper left visual hemifields, than in the lower right.
In a different type of discrimination task Berardi & Fiorentini, (1991) found the opposite difference in ability but the same morphology. They write "The data shown in Fig. 1, A and B, confirm the previously observed asymmetry between the left and the right visual hemified, probably reflecting hemispheric specialization (Fiorentini & Berardi, 1984). A superiority of the lower hemifield with respect to the upper hemifield was also observed in the present discrimination task."
This and other results finding visual processing differences separated along an axis including the left and lower, as opposed to the right and upper quadrants of the visual field, presents a pattern of processing ability in the shape of a rotated 'S' axis or Taoism symbol similar to an inverted form of the CBR "axis of evil," where the left side is extended across the top, and the right side extended across the bottom. In other words, the Taoism symbol morphology appears to be shared by both the cosmos and human visual field/cortex. I argue that the morphological similarities between the visual field and the universe are in all cases, no coincidence. These asymmetries of the visual field may explain the different "temperature" of the hot and cool "lobes of the universe" (Huterer, 2007) on either side of the CBR "axis of evil."
I am probably imagining the similarity between the asymmetry of the laminar distribution in the human visual cortex (Eickhoff, Rottschy, Kujovic, Palomero-Gallagher, & Zilles, 2008) and the asymmetry of the WMAP and Planck CBR power spectrum (see Bennett et al., 2013, pp 37-38 and Francis, 2013 respectively), but the point of this article is that both are asymmetrical, have a similar morphology, and this is predicted by a phenomenalist, empiricist or holistic interpretation of both, really the same, sets of data (Takemoto, 2014). I don't seriously entertain this notion but perhaps the "cold spots" occluded by "supervoids" (Szapudi et al., others, 2015) found in the CBR map of the universe, might correspond to the blind spots in our visual field.
In other research on visual field asymmetries in mental rotation abilities, (Burton, Wagner, Lim, and Levy (1992) found that clockwise mental rotations are performed faster in the left visual field were counterclockwise rotations are performed faster in the right visual field. These visual processing asymmetries parallel the galaxy rotation asymmetries found by Longo (2007, 2008).
Finally to test this hypothesis I attempt to find a novel feature of the cosmic background data, predicted by research on the visual field. One of the most cited evolutionarily sound asymmetries in visual field processing, and the reason perhaps why bifocal glasses are so easy to adapt to, is that proposed by Previc (1990): the upper visual field is more adept at processing distant stimuli than the lower visual field. Is there a similar phenomena is present in the cosmic background data? I was initially unaware of any such parallel.
It would seem that the answer is very possibly yes. An anomalous "dark flow" (Kashlinsky, Atrio-Barandela, Kocevski, & Ebeling, 2009) of galaxies away from us into the distance. This happens to occur, fortuitously or not, in the upper half of diagrams of the cosmic background radiation. Some cosmologists are arguing that dark flow suggests the presents of another universe sucking galaxies into the distance. Others have argued that the movement suggests that the universe is at a tilt (Atrio-Barandela, Kashlinsky, Ebeling, Kocevski, & Edge, 2012). If part, and in some sense the "upper part" of the universe were to found to be tilted away then this might correspond to the way in which the visual field is titled in its specialization toward foreground and distant visual processing. The dark flow anomaly remains controversial but one of the main proponents Dr. Kashlinsky is quoted as saying "This flow suggested that the universe had somehow become lopsided, as if space-time itself was behaving like a tilted table and matter was sliding off" (Maggine, McKee, 2013). I rest my case.
Conclusion
In any event, as science finds more similarities between experience and the universe as a whole, we shall perhaps be persuaded that the distant stars are, in a sense, not so distant at all. I am not of course suggesting that will suddenly be able to touch the stars. But to be realistic, there should be a reversal in our understanding of the nature of the universe. Sensations are often thought of as data to help us understand the rational scientific universe "out there" (e.g. Jackson, 1986) . It is really rather the case that, as Mach (1897) and Hume (1739) argued, that the rational scientific universe is a matrix of information and hypotheses, blather not matter, that serves to facilitate our understand our sensations, the stuff, the being of the universe.
Afterword
As always, I end by asking, what keeps the the stars out there? What separates us from the world? I suggest it is because we think we have someone with us as we watch our sensations, the stars. This convinces us that the Kantian 'thing it itself' is more than a hypothesis, more than a kind of simulation or role playing game .
This suggestion may seem a very depressing solipsism each being trapped inside our own private black hole. But it could also be argued, on the contrary, that the unreal "spirit of gravity" (Nietzsche, 2006) with whom I pretend to converse, prevents me from realising that universe of which I am a part, is itself part of the multiverse (Good, 1972), and that we are connected. In the words of Terrence Mallick, (Malick, 1999) we each stand in the others light.
Image second from bottom
www.vision-and-eye-health.com/visual-field.html
Should you wish that I cease and desist please be so kind as to comment below or contact me via the email link at nihonbunka.com
Bibliography
Aron, Jacob. (2013, March 21). Planck shows almost perfect cosmos – plus axis of evil. New Scientist. Retrieved from
www.newscientist.com/article/dn23301-planck-shows-almost-...
Atrio-Barandela, F., Kashlinsky, A., Ebeling, H., Kocevski, D., & Edge, A. (2012). Large scale peculiar velocities from clusters of galaxies: Is the universe tilted? In AIP Conference Proceedings (Vol. 1458, pp. 9–22). AIP Publishing. doi.org/10.1063/1.4734401
Bennett, C. L., Larson, D., Weiland, J. L., Jarosik, N., Hinshaw, G., Odegard, N., … Wright, E. L. (2013). Nine-year Wilkinson Microwave Anisotropy Probe (WMAP) Observations: Final Maps and Results. The Astrophysical Journal Supplement Series, 208(2), 20. doi.org/10.1088/0067-0049/208/2/20
Burton, L. A., Wagner, N., Lim, C., & Levy, J. (1992). Visual field differences for clockwise and counterclockwise mental rotation. Brain and Cognition, 18(2), 192–207. doi.org/10.1016/0278-2626(92)90078-Z
Campanelli, L., Cea, P., Fogli, G. L., & Tedesco, L. (2011). Anisotropic dark energy and ellipsoidal universe. International Journal of Modern Physics D, 20(06), 1153–1166. doi.org/10.1142/S021827181101927X
Carroll, S. (n.d.). A New CMB Anomaly? Retrieved 7 July 2015, from www.preposterousuniverse.com/blog/2008/07/17/a-new-cmb-an...
Cea, P. (2014). The ellipsoidal universe in the Planck satellite era. Monthly Notices of the Royal Astronomical Society, 441(2), 1646–1661. Retrieved from mnras.oxfordjournals.org/content/441/2/1646.short
Choi, Charles, Q. (2006). Bursting the Spherical Bubble: Universe Might Be Pill-Shaped. Retrieved 7 July 2015, from www.space.com/2988-bursting-spherical-bubble-universe-pil...
Eickhoff, S. B., Rottschy, C., Kujovic, M., Palomero-Gallagher, N., & Zilles, K. (2008). Organizational Principles of Human Visual Cortex Revealed by Receptor Mapping. Cerebral Cortex, 18(11), 2637–2645. doi.org/10.1093/cercor/bhn024
Francis, M. (2013, March 21). First Planck results: the Universe is still weird and interesting. Retrieved 7 July 2015, from arstechnica.com/science/2013/03/first-planck-results-the-...
Genzano, V. R., Di Nocera, F., & Ferlazzo, F. (2001). Upper/lower visual field asymmetry on a spatial relocation memory task. Neuroreport, 12(6), 1227–1230. Retrieved from journals.lww.com/neuroreport/Abstract/2001/05080/Upper_lo...
Good, I. J. (1972). Chinese universes. Physics Today, 25(7), 15. doi.org/10.1063/1.3070923
Groeneboom, N. E., & Eriksen, H. K. (2009). Bayesian analysis of sparse anisotropic universe models and application to the 5-yr WMAP data. The Astrophysical Journal, 690(2), 1807–1819. doi.org/10.1088/0004-637X/690/2/1807
Hellige, J. B. (1996). Hemispheric asymmetry for visual information processing. Acta Neurobiologiae Experimentalis, 56, 485–497. Retrieved from www.rozjec.ane.pl/pdf/56056.pdf
Hogan, C. (2013). Now Broadcasting in Planck Definition. arXiv:1307.2283 [gr-Qc, Physics:quant-Ph]. Retrieved from arxiv.org/abs/1307.2283
Hume, D. (1739). A Treatise of Human Nature. Courier Corporation.
Huterer, D. (2007). Why is the solar system cosmically aligned? Astronomy, 35(12), 38–43. Retrieved from www-personal.umich.edu/~huterer/PRESS/CMB_Huterer.pdf
Hutsemekers, D. (2014). Large-scale alignments of quasar polarization vectors. Observational evidence and possible implications for cosmology and fundamental physics. In ESO Santiago Science Colloquia and Seminars. Retrieved from orbi.ulg.be/handle/2268/183128
Jackson, F. (1986). What Mary didn’t know. The Journal of Philosophy, 83(5), 291–295. Retrieved from
www.philosophicalturn.net/intro/Consciousness/Jackson_Mar...
Kashlinsky, A., Atrio-Barandela, F., Kocevski, D., & Ebeling, H. (2009). A measurement of large-scale peculiar velocities of clusters of galaxies: technical details. The Astrophysical Journal, 691(2), 1479. Retrieved from iopscience.iop.org/0004-637X/691/2/1479
Land, K., & Magueijo, J. (2005). The axis of evil. Physical Review Letters, 95(7). doi.org/10.1103/PhysRevLett.95.071301
Longo, M. J. (2007). Evidence for a Preferred Handedness of Spiral Galaxies. arXiv:0707.3793 [astro-Ph]. Retrieved from arxiv.org/abs/0707.3793
Longo, M. J. (2008). Does the Universe Have a Handedness? arXiv:0812.3437 [astro-Ph]. Retrieved from arxiv.org/abs/0812.3437
Mach, E. (1897). Contributions to the Analysis of the Sensations. (C. M. Williams, Trans.). The Open court publishing company. Retrieved from www.archive.org/details/contributionsto00machgoog
Malick, T. (1999). The Thin Red Line. Drama, War.
NASA/WMAP Science Team. (2012). WMAP 9 Year Mission Results. Retrieved 7 July 2015, from map.gsfc.nasa.gov/news/
Nietzsche, F. (2006). Thus Spoke Zarathustra: A Book for All and None. (Adrian Del Caro, Trans.). Cambridge: Cambridge University Press.
Norton, J. D. (2010). How Hume and Mach Helped Einstein Find Special Relativity. Discourse on a New Method: Reinvigorating the Marriage of History and Philosophy of Science, 359–86.
Previc, F. H. (1990). Functional specialization in the lower and upper visual fields in humans: Its ecological origins and neurophysiological implications. Behavioral and Brain Sciences, 13(03), 519–542. doi.org/10.1017/S0140525X00080018
Maggine, McKee. (n.d.). Blow for ‘dark flow’ in Planck’s new view of the cosmos. New Scientist, (2911), 2013/3/21. Retrieved from www.newscientist.com/article/dn23340-blow-for-dark-flow-i...
Sawangwit, U., & Shanks, T. (2010). Is everything we know about the universe wrong? Astronomy & Geophysics, 51(5), 5.14–5.16. doi.org/10.1111/j.1468-4004.2010.51514.x
Susskind, L. (1995). The World as a Hologram. Journal of Mathematical Physics, 36(11), 6377. doi.org/10.1063/1.531249
Szapudi, I., Kovács, A., Granett, B. R., Frei, Z., Silk, J., Burgett, W., … Kaiser, N., others. (2015). Detection of a supervoid aligned with the cold spot of the cosmic microwave background. Monthly Notices of the Royal Astronomical Society, 450(1), 288–294. Retrieved from mnras.oxfordjournals.org/content/450/1/288.short
Takemoto, T. (2014). Einstein, Bats and ‘Past-Pointing’ Dark Matter. Holistic Science Journal ISSN 2044-4389, 2(3). Retrieved from holisticsciencejournal.co.uk/ojs/index.php/hsj/article/vi...
Trosper, J. (2014). 4 Anomalies in The Big Bang Afterglow: Retrieved from www.fromquarkstoquasars.com/4-anomalies-in-the-big-bang-a...
Visual Field. (n.d.). Retrieved 7 July 2015, from www.vision-and-eye-health.com/visual-field.html
Wilkinson Microwave Anisotropy Probe (WMAP). (n.d.). Retrieved 7 July 2015, from map.gsfc.nasa.gov/
Yamaguchi, S., Yamagata, S., & Kobayashi, S. (2000). Cerebral asymmetry of the top-down allocation of attention to global and local features. Journal of Neuroscience, 20(9), RC72. Retrieved from www.zielinskifam.com/lit/gumc_nsci_papers/assym_top-down_...
"2 Of Amerikaz Most Wanted"
(feat. Snoop Doggy Dogg)
[Snoop] Up out of there
[Tupac] (chuckles)
Ain't nuttin but a gangsta party
[Snoop] Pump that up G
[Tupac] Ahh shit, you done fucked up now --
Ain't nuttin but a gangsta party
You done put two of America's
most wanted in the same
motherfuckin place at the same
Ain't nuttin but a gangsta party
motherfuckin time, hahahahah
Y'all niggaz about to feel this
Ain't nuttin but a gangsta party
Break out the champagne glasses
and the motherfuckin condoms
Have one on us aight??
Ain't nuttin but a gangsta party
[Verse One: 2Pac, Snoop]
Picture perfect, I paint a perfect picture
Bomb the hoochies with precision my intention's to get richer
With the S-N double-O-P, Dogg my fuckin homey
Youse a cold ass nigga on them hogs
Sho nuff, I keep my hand on my gun, cuz they got me on the run
Now I'm back in the courtroom waitin on the outcome
Free Tupac, is all that's on a niggaz mind
But at the same time it seem they tryin to take mine
So I'ma get smart, and get defensive and shit
And put together a million march, for some gangsta shit
So now they got us laced
Two multimillionare motherfuckers catchin cases (mmm)
Bitches get ready for the throwdown, the shit's about to go down
Uhh, me and Snoop about to clown
I'm "Losin My Religion", I'm vicious on these stool pigeons
You might be deep in this game, but you got the rules missin
Niggaz be actin like they savage, they out to get the cabbage
I got, nuthin but love, for my niggaz livin lavish
I got a pit named P, she niggarino
I got a house out in the hills right next to Chino
and I, think I got a black Beamer
but my dream is to own a fly casino
like Bugsy Seagel, and do it all legal
and get scooped up, by the little homie in the Regal
Mmm, it feel good to you baby bubba
Ya see, this is for the G's and the keys motherfucker
Now follow as we riiiiide
Motherfuck the rest, two of the best from the West side
And I can make you famous
Niggaz been dyin for years, so how could they blame us
I live in fear of a felony
I never stop bailin these, motherfuckin G's
If ya got it better flaunt it, another warrant
2 of Amerikaz Most Wanted
[Chorus:]
Ain't nuttin but a gangsta party
Ain't nuttin but a gangsta party
[Tupac] Nuthin but a gangsta party...
Ain't nuttin but a gangsta party
Nuthin but a gangsta party
it ain't nuthin but a
motherfuckin gangsta party
Ain't nuttin but a gangsta party
Nuthin but a gangsta party
it ain't nuthin but a
motherfuckin gangsta party
Ain't nuttin but a gangsta party
[Verse Two: 2Pac, Snoop]
Now give me fifty feet
Defeat is not my destiny, release me to the streets
And keep whatever's left of me
Jealousy is misery, suffering is grief
Better be prepared when you cowards fuck wit me
I bust and flea, these niggaz must be crazy what??
There ain't no mercy motherfuckers who can fade the Thugs
(hahah right) You thought it was but it wasn't, now dissapear
Bow down in the presence of a boss player
It's like cuz, blood, gangbangin
Everybody in the party doin dope slangin
You got to have papers in this world
You might get your first snatch, before your eyes swerl
Ya doing ya job, every day
And then you work so hard til ya hair turn gray
Let me tell you about life, and bout the way it is
You see we live by the gun, so we die by the gun's kids
They tell me not to roll with my glock
So now I gotta throw away
Floatin in the black Benz, tryin to do a show a day
They wonder how I live, with five shots
Niggaz is hard to kill, on my block
Schemes for currency and doe related
Affiliated with the hustlers, so we made it
No answers to questions, I'm tryin to get up on it
My nigga Dogg with me, eternally the most wanted
When most people think of highly venomous and potent snakes throughout the western states, they might first think of the bold and respectable rattlesnake, however a far more potent and secretive species lurks within the underbrush. This is the Texas coralsnake, one of three elapids found in North America and also one of the most potent snakes in the country.
Equipped with a deadly neurotoxin and myotoxin, this snake is easily able to dispatch a wide assortment of prey, including rattlesnakes.
People are quick to state that there is no antivenom available to treat the venom of these snakes, and while this is true, most people overlook the reason behind this. Production of antivenom to treat coralsnake bites was considered to be a loss of profit for the manufactures due to the fact that people almost never get bitten by these snakes.
These snakes are incredibly secretive and are quite reluctant to bite and only do so if absolutely necessary. This individual did not pose a threat whatsoever and I felt very comfortable in its 3 foot presence despite it packing a bite that could easily dispatch me.
A New PAC-Bayesian Perspective on Domain Adaptation. Germain, Habrard, Laviolette, Morvant arxiv.org/abs/1506.04573 #stat
Bayesian inference for spatio-temporal spike and slab priors. Andersen, Vehtari, Winther, Hansen arxiv.org/abs/1509.04752 #stat
Six Pentium M Linux computers in the center running Bayesian algorithms, strategy and control. Two vision pre-processing computers on the right. Volkswagen exposed the drive-by-wire interface to the development team.
This is Stanford’s autonomous robotic vehicle that will compete in the DARPA Grand Challenge in October, racing across the desert at 30mph without any human intervention.
Bayesian inference for spatio-temporal spike and slab priors. Andersen, Vehtari, Winther, Hansen arxiv.org/abs/1509.04752 #stat
Bayesian inference for spatio-temporal spike and slab priors. Andersen, Vehtari, Winther, Hansen arxiv.org/abs/1509.04752 #stat
Bayesian inference for spatio-temporal spike and slab priors. Andersen, Vehtari, Winther, Hansen arxiv.org/abs/1509.04752 #stat
Photo Credit: Sandeep Sharma and Trishna Dutta, Smithsonian Conservation Biology Institute
As economic expansion and development fragments the forest landscape of central India, the species that rely on that habitat—including endangered tigers and leopards—face dwindling populations and increased competition for food and resources. Smithsonian Conservation Biology Institute scientists analyzed the genes of these great cats in the Satpura-Maikal landscape—a 15,000 km2 area composed of four interconnected reserves: Kanha, Satpura, Melghat and Pench. From April-June 2009 and Nov. 2009-May 2010, they collected scat (fecal matter) and hair samples for DNA analysis. This data, combined with India’s forest ecology history, enabled SCBI scientists to construct a definitive picture of how habitat loss affects the genetic diversity and gene flow of cat populations. Published in Evolutionary Applications and Proceedings of the Royal Society B, their research demonstrates that an intact forest corridor is vital for maintaining gene flow in these great cats.
Human activity in and around the Satpura-Maikal forest has dramatically changed the landscape over the course of 300 years. From 1700 C.E. to 2000 C.E., the habitat underwent a 25-fold increase in urbanization. Human population increased ten-fold, and anthropogenic activities resulted in the clearing of 78 percent of the forest, leaving just 32 percent of viable habitat for leopards and tigers. The reduced and fragmented landscape makes it difficult for these solitary animals to safely move between protected reserved in search of mates and territory.
SCBI scientists collected 1,411 scat samples, 66 hair samples and four claw samples and identified 217 leopards and 273 tigers in the same region. By extracting and analyzing genetic material, scientists found that leopard gene flow between the four protected areas in central India is much lower today than it has been in the past. The greatest decline of genetic diversity occurred between Melghat and Pench, the two most fragmented reserves. Reserves connected by forest corridors, however, has a higher rate of gene flow, suggesting that habitat connectivity directly affects the ability of leopards to find an unrelated mate.
Scientists found similar results for tigers. Three of the reserve pairs with poor forest connectivity—Kanha-Satpura, Pench-Melghat and Kanha-Melghat—showed a 47 to 70 percent reduction in gene flow when compared to historic levels. The most dramatic decrease in gene flow occurred between Kanha and Satpura—the pair of reserves with the least functional forest corridors.
As part of these studies, scientists reconstructed the demographic history of tigers in the Satpura-Maikal landscape. Using Bayesian and coalescent-based analyses, scientists identified three points when tiger populations clearly diverged. They found that tigers first entered India around 10,000 years ago. Their habitat fragmented 700 years ago as agricultural expansion and other human activities took place. In the eighteenth and nineteenth centuries, the third divergence event occurred as the British Empire expanded its territory and cleared the central Indian forests at an accelerated rate. After this development, the tiger population was drastically reduced and was further isolated.
As urbanization continues to infringe upon the natural Satpura-Maikal landscape, forest corridors play an increasingly important role in ensuring the survival of leopard and tiger populations. This research will be highly relevant to policy makers in central India as deforestation, road widening and coal mining continue to threaten tiger and leopard habitat. Both studies call for the protection of central India’s forest corridors, which are vital to maintaining genetic diversity in the populations by maintaining gene flow between protected areas. For more information on the role these corridors play in the conservation of big cat species, visit the Zoo’s website.
# # #
If garbage can toward parking lot make love to beyond freight train, then girl inside sweeps the floor.But they need to remember how non-chalantly near dolphin beams with joy.Unlike so many piroshki who have made their sprightly cowboy to us.He called her Kari (or was it Kari?).Still go deep sea fishing with her from from onlooker, boogie her near taxidermist with cargo bay toward.
As Bayesian filtering has become popular as a spam-filtering technique, spammers have started using methods to weaken it. To a rough approximation, Bayesian filters rely on word probabilities. If a message contains many words which are only used in spam, and few which are never used in spam, it is likely to be spam. To weaken Bayesian filters, some spammers, alongside the sales pitch, now include lines of irrelevant, random words which, when read aloud, quite often sound like examples of Vogon poetry. A variant on this tactic may be borrowed from the Usenet abuser known as "Hipcrime" -- to include passages from books taken from Project Gutenberg, or nonsense sentences generated with "dissociated press" algorithms. Randomly generated phrases can create spamoetry (spam poetry) or spam art.
Another method used to masquerade spam as legitimate messages is the use of autogenerated sender names in the From: field, ranging from realistic ones such as "Jackie F. Bird" to (either by mistake or intentionally) bizarre attention-grabbing names such as "Sloppiest U. Epiglottis" or "Attentively E. Behavioral".
-- from Wikipedia
Technical Session # 5 Learning at
The First Conference on Artificial General Intelligence (AGI-08) 1-3 March 2008
Israel Gottlieb presents Participating in Cognition: The Interactive Search Optimization Algorithm by Nadav Abkasis, Israel Gottlieb, and Eliraz Itzchaki of Department of Computer Science, Jerusalem College of Technology, Israel
1. Artificial General Intelligence (AGI) dealing with new situations,
2. Plans/Results for the Interactive Search Optimization Algorithm,
Adversarial Sequence Prediction by Bill Hibbard of University of Wisconsin
3. Predators vs. Evaders - Adversarial Sequence Prediction,
Artificial General Intelligence through Large-Scale, Multimodal Bayesian Learning by Brian Milch of MIT Computer Science and Artificial Intelligence Laboratory
4. Artificial General Intelligence through Large-Scale, Multimodal Bayesian Learning,
A Computational Approximation to the AIXI Model by Sergey Pankov from Florida State University.
5. AIXI Overview - Sergey Pankov,
Matthew Taylor presents Transfer Learning and Intelligence: an Argument and Approach
by Matthew Taylor , Gregory Kuhlmann , and Peter Stone of Learning Agents Research Group, Department of Computer Science , University of Texas at Austin
6. Matthew Taylor presents Transfer Learning and Intelligence
mosaic_learn_agi08
Bayesian inference for spatio-temporal spike and slab priors. Andersen, Vehtari, Winther, Hansen arxiv.org/abs/1509.04752 #stat
Photo Credit: Sandeep Sharma and Trishna Dutta, Smithsonian Conservation Biology Institute
As economic expansion and development fragments the forest landscape of central India, the species that rely on that habitat—including endangered tigers and leopards—face dwindling populations and increased competition for food and resources. Smithsonian Conservation Biology Institute scientists analyzed the genes of these great cats in the Satpura-Maikal landscape—a 15,000 km2 area composed of four interconnected reserves: Kanha, Satpura, Melghat and Pench. From April-June 2009 and Nov. 2009-May 2010, they collected scat (fecal matter) and hair samples for DNA analysis. This data, combined with India’s forest ecology history, enabled SCBI scientists to construct a definitive picture of how habitat loss affects the genetic diversity and gene flow of cat populations. Published in Evolutionary Applications and Proceedings of the Royal Society B, their research demonstrates that an intact forest corridor is vital for maintaining gene flow in these great cats.
Human activity in and around the Satpura-Maikal forest has dramatically changed the landscape over the course of 300 years. From 1700 C.E. to 2000 C.E., the habitat underwent a 25-fold increase in urbanization. Human population increased ten-fold, and anthropogenic activities resulted in the clearing of 78 percent of the forest, leaving just 32 percent of viable habitat for leopards and tigers. The reduced and fragmented landscape makes it difficult for these solitary animals to safely move between protected reserved in search of mates and territory.
SCBI scientists collected 1,411 scat samples, 66 hair samples and four claw samples and identified 217 leopards and 273 tigers in the same region. By extracting and analyzing genetic material, scientists found that leopard gene flow between the four protected areas in central India is much lower today than it has been in the past. The greatest decline of genetic diversity occurred between Melghat and Pench, the two most fragmented reserves. Reserves connected by forest corridors, however, has a higher rate of gene flow, suggesting that habitat connectivity directly affects the ability of leopards to find an unrelated mate.
Scientists found similar results for tigers. Three of the reserve pairs with poor forest connectivity—Kanha-Satpura, Pench-Melghat and Kanha-Melghat—showed a 47 to 70 percent reduction in gene flow when compared to historic levels. The most dramatic decrease in gene flow occurred between Kanha and Satpura—the pair of reserves with the least functional forest corridors.
As part of these studies, scientists reconstructed the demographic history of tigers in the Satpura-Maikal landscape. Using Bayesian and coalescent-based analyses, scientists identified three points when tiger populations clearly diverged. They found that tigers first entered India around 10,000 years ago. Their habitat fragmented 700 years ago as agricultural expansion and other human activities took place. In the eighteenth and nineteenth centuries, the third divergence event occurred as the British Empire expanded its territory and cleared the central Indian forests at an accelerated rate. After this development, the tiger population was drastically reduced and was further isolated.
As urbanization continues to infringe upon the natural Satpura-Maikal landscape, forest corridors play an increasingly important role in ensuring the survival of leopard and tiger populations. This research will be highly relevant to policy makers in central India as deforestation, road widening and coal mining continue to threaten tiger and leopard habitat. Both studies call for the protection of central India’s forest corridors, which are vital to maintaining genetic diversity in the populations by maintaining gene flow between protected areas. For more information on the role these corridors play in the conservation of big cat species, visit the Zoo’s website.
# # #
Artificial General Intelligence through Large-Scale, Multimodal Bayesian Learning by Brian Milch of MIT Computer Science and Artificial Intelligence Laboratory
Data to Learn From:
- Text?
- Experience of physical or virtual robots
- Multimodal data on the Web
in Technical Session # 5: Learning chaired by J. Storrs Hall at the The First Conference on Artificial General Intelligence (AGI-08)
This room is The Zone, at the FedEx Institute of Technology, University of Memphis. It was a very good venue for this conference.
Artificial General Intelligence (AGI) research focuses on the original and ultimate goal of AI -- to create intelligence as a whole, by exploring all available paths, including theoretical and experimental computer science, cognitive science, neuroscience, and innovative interdisciplinary methodologies. AGI is also called Strong AI in the AI community.
Another good reference is Artificial General Intelligence : A Gentle Introduction by Pei Wang
I030208 179
This figure shows the family tree of cyanobacteria, the first organisms to evolve oxygen-producing photosynthesis. It highlights cyanobacteria from the cryosphere, or the permanently frozen parts of the earths surface. It shows that cyanobacteria from the cryosphere are incredibly diverse and represent species from all across the cyanobacterial tree of life. This figure was produced as part of a PhD project on the diversity and evolution of cyanobacteria in the cryosphere carried out by Nathan Chrismas in the School of Geographical Sciences and has been published in the journal Frontiers in Microbiology.
Chrismas NAM, Anesio A, Sanchez-Baracaldo P. (2015). Multiple adaptations to polar and alpine environments within cyanobacteria: a phylogenomic and Bayesian approach. Frontiers in Microbiology 6: 1070. doi: 10.3389/fmicb.2015.01070
This is my current class, it is fun and a bit challenging. The class started only five days ago, but I am already a bit behind. Daphne Koller is a great teacher, and has a vision to help provide quality education to the world, via Coursera
Daphne Koller: What we're learning from online education
Very interesting - can 98% of our student be above average? See -Bloom's 2 Sigma Problem
Maybe - if we have a computer tutor....
"College is a place where a professor’s lecture notes go straight to the students’ lecture notes, without passing through the brains of either." Attributed to Mark Twain (or perhaps not)
Quote Investigator: There is no substantive evidence connecting this saying to Mark Twain.
pgm20120929
Statistics rarely give a simple view's Yes/No type answer to the question under analysis. Interpretation often comes down to the level of statistical significance applied to the numbers and often refers to the probability of a value accurately rejecting the null hypothesis (sometimes referred to as the p-value).
In this graph the black line is probability distribution for the test statistic, the critical region is the set of values to the right of the observed data point (observed value of the test statistic) and the p-value is represented by the green area.
The standard approach is to test a null hypothesis against an alternative hypothesis. A critical region is the set of values of the estimator that leads to refuting the null hypothesis. The probability of type I error is therefore the probability that the estimator belongs to the critical region given that null hypothesis is true (statistical significance) and the probability of type II error is the probability that the estimator doesn't belong to the critical region given that the alternative hypothesis is true. The statistical power of a test is the probability that it correctly rejects the null hypothesis when the null hypothesis is false.
Referring to statistical significance does not necessarily mean that the overall result is significant in real world terms. For example, in a large study of a drug it may be shown that the drug has a statistically significant but very small beneficial effect, such that the drug is unlikely to help the patient noticeably.
While in principle the acceptable level of statistical significance may be subject to debate, the p-value is the smallest significance level that allows the test to reject the null hypothesis. This is logically equivalent to saying that the p-value is the probability, assuming the null hypothesis is true, of observing a result at least as extreme as the test statistic. Therefore, the smaller the p-value, the lower the probability of committing type I error.
Some problems are usually associated with this framework (See criticism of hypothesis testing):
A difference that is highly statistically significant can still be of no practical significance, but it is possible to properly formulate tests to account for this. One response involves going beyond reporting only the significance level to include the p-value when reporting whether a hypothesis is rejected or accepted. The p-value, however, does not indicate the size or importance of the observed effect and can also seem to exaggerate the importance of minor differences in large studies. A better and increasingly common approach is to report confidence intervals. Although these are produced from the same calculations as those of hypothesis tests or p-values, they describe both the size of the effect and the uncertainty surrounding it.
Fallacy of the transposed conditional, aka prosecutor's fallacy: criticisms arise because the hypothesis testing approach forces one hypothesis (the null hypothesis) to be favored, since what is being evaluated is probability of the observed result given the null hypothesis and not probability of the null hypothesis given the observed result. An alternative to this approach is offered by Bayesian inference, although it requires establishing a prior probability.
Rejecting the null hypothesis does not automatically prove the alternative hypothesis.
As everything in inferential statistics it relies on sample size, and therefore under fat tails p-values may be seriously mis-computed.
Working from a null hypothesis, two basic forms of error are recognized:
Type I errors where the null hypothesis is falsely rejected giving a "false positive".
Type II errors where the null hypothesis fails to be rejected and an actual difference between populations is missed giving a "false negative".
Standard deviation refers to the extent to which individual observations in a sample differ from a central value, such as the sample or population mean, while Standard error refers to an estimate of difference between sample mean and population mean.
A statistical error is the amount by which an observation differs from its expected value, a residual is the amount an observation differs from the value the estimator of the expected value assumes on a given sample (also called prediction).
Mean squared error is used for obtaining efficient estimators, a widely used class of estimators. Root mean square error is simply the square root of mean squared error.
Misuse of statistics can produce subtle, but serious errors in description and interpretation—subtle in the sense that even experienced professionals make such errors, and serious in the sense that they can lead to devastating decision errors. For instance, social policy, medical practice, and the reliability of structures like bridges all rely on the proper use of statistics.
Even when statistical techniques are correctly applied, the results can be difficult to interpret for those lacking expertise. The statistical significance of a trend in the data—which measures the extent to which a trend could be caused by random variation in the sample—may or may not agree with an intuitive sense of its significance. The set of basic statistical skills (and skepticism) that people need to deal with information in their everyday lives properly is referred to as statistical literacy.
There is a general perception that statistical knowledge is all-too-frequently intentionally misused by finding ways to interpret only the data that are favorable to the presenter.[26] A mistrust and misunderstanding of statistics is associated with the quotation, "There are three kinds of lies: lies, damned lies, and statistics". Misuse of statistics can be both inadvertent and intentional, and the book How to Lie with Statistics[26] outlines a range of considerations. In an attempt to shed light on the use and misuse of statistics, reviews of statistical techniques used in particular fields are conducted (e.g. Warne, Lazo, Ramos, and Ritter (2012)).[27]
Ways to avoid misuse of statistics include using proper diagrams and avoiding bias.[28] Misuse can occur when conclusions are overgeneralized and claimed to be representative of more than they really are, often by either deliberately or unconsciously overlooking sampling bias.[29] Bar graphs are arguably the easiest diagrams to use and understand, and they can be made either by hand or with simple computer programs.[28] Unfortunately, most people do not look for bias or errors, so they are not noticed. Thus, people may often believe that something is true even if it is not well represented.[29] To make data gathered from statistics believable and accurate, the sample taken must be representative of the whole.[30] According to Huff, "The dependability of a sample can be destroyed by [bias]... allow yourself some degree of skepticism.
A least squares fit: in red the points to be fitted, in blue the fitted line.
Many statistical methods seek to minimize the residual sum of squares, and these are called "methods of least squares" in contrast to Least absolute deviations. The latter gives equal weight to small and big errors, while the former gives more weight to large errors. Residual sum of squares is also differentiable, which provides a handy property for doing regression. Least squares applied to linear regression is called ordinary least squares method and least squares applied to nonlinear regression is called non-linear least squares. Also in a linear regression model the non deterministic part of the model is called error term, disturbance or more simply noise. Both linear regression and non-linear regression are addressed in polynomial least squares, which also describes the variance in a prediction of the dependent variable (y axis) as a function of the independent variable (x axis) and the deviations (errors, noise, disturbances) from the estimated (fitted) curve.
Measurement processes that generate statistical data are also subject to error. Many of these errors are classified as random (noise) or systematic (bias), but other types of errors (e.g., blunder, such as when an analyst reports incorrect units) can also be important. The presence of missing data or censoring may result in biased estimates and specific techniques have been developed to address these problems.
Statistics is a branch of mathematics dealing with the collection, analysis, interpretation, presentation, and organization of data. In applying statistics to, e.g., a scientific, industrial, or social problem, it is conventional to begin with a statistical population or a statistical model process to be studied. Populations can be diverse topics such as "all people living in a country" or "every atom composing a crystal." Statistics deals with all aspects of data including the planning of data collection in terms of the design of surveys and experiments.When census data cannot be collected, statisticians collect data by developing specific experiment designs and survey samples. Representative sampling assures that inferences and conclusions can reasonably extend from the sample to the population as a whole. An experimental study involves taking measurements of the system under study, manipulating the system, and then taking additional measurements using the same procedure to determine if the manipulation has modified the values of the measurements. In contrast, an observational study does not involve experimental manipulation.Two main statistical methods are used in data analysis: descriptive statistics, which summarize data from a sample using indexes such as the mean or standard deviation, and inferential statistics, which draw conclusions from data that are subject to random variation (e.g., observational errors, sampling variation). Descriptive statistics are most often concerned with two sets of properties of a distribution (sample or population): central tendency (or location) seeks to characterize the distribution's central or typical value, while dispersion (or variability) characterizes the extent to which members of the distribution depart from its center and each other. Inferences on mathematical statistics are made under the framework of probability theory, which deals with the analysis of random phenomena.A standard statistical procedure involves the test of the relationship between two statistical data sets, or a data set and synthetic data drawn from idealized model. A hypothesis is proposed for the statistical relationship between the two data sets, and this is compared as an alternative to an idealized null hypothesis of no relationship between two data sets. Rejecting or disproving the null hypothesis is done using statistical tests that quantify the sense in which the null can be proven false, given the data that are used in the test. Working from a null hypothesis, two basic forms of error are recognized: Type I errors (null hypothesis is falsely rejected giving a "false positive") and Type II errors (null hypothesis fails to be rejected and an actual difference between populations is missed giving a "false negative"). Multiple problems have come to be associated with this framework: ranging from obtaining a sufficient sample size to specifying an adequate null hypothesis.Measurement processes that generate statistical data are also subject to error. Many of these errors are classified as random (noise) or systematic (bias), but other types of errors (e.g., blunder, such as when an analyst reports incorrect units) can also be important. The presence of missing data or censoring may result in biased estimates and specific techniques have been developed to address these problems.In applying statistics to a problem, it is common practice to start with a population or process to be studied. Populations can be diverse topics such as "all persons living in a country" or "every atom composing a crystal".
Ideally, statisticians compile data about the entire population (an operation called census). This may be organized by governmental statistical institutes. Descriptive statistics can be used to summarize the population data. Numerical descriptors include mean and standard deviation for continuous data types (like income), while frequency and percentage are more useful in terms of describing categorical data (like race).
When a census is not feasible, a chosen subset of the population called a sample is studied. Once a sample that is representative of the population is determined, data is collected for the sample members in an observational or experimental setting. Again, descriptive statistics can be used to summarize the sample data. However, the drawing of the sample has been subject to an element of randomness, hence the established numerical descriptors from the sample are also due to uncertainty. To still draw meaningful conclusions about the entire population, inferential statistics is needed. It uses patterns in the sample data to draw inferences about the population represented, accounting for randomness. These inferences may take the form of: answering yes/no questions about the data (hypothesis testing), estimating numerical characteristics of the data (estimation), describing associations within the data (correlation) and modeling relationships within the data (for example, using regression analysis). Inference can extend to forecasting, prediction and estimation of unobserved values either in or associated with the population being studied; it can include extrapolation and interpolation of time series or spatial data, and can also include data mining.When full census data cannot be collected, statisticians collect sample data by developing specific experiment designs and survey samples. Statistics itself also provides tools for prediction and forecasting through statistical models. To use a sample as a guide to an entire population, it is important that it truly represents the overall population. Representative sampling assures that inferences and conclusions can safely extend from the sample to the population as a whole. A major problem lies in determining the extent that the sample chosen is actually representative. Statistics offers methods to estimate and correct for any bias within the sample and data collection procedures. There are also methods of experimental design for experiments that can lessen these issues at the outset of a study, strengthening its capability to discern truths about the population. Sampling theory is part of the mathematical discipline of probability theory. Probability is used in mathematical statistics to study the sampling distributions of sample statistics and, more generally, the properties of statistical procedures. The use of any statistical method is valid when the system or population under consideration satisfies the assumptions of the method. The difference in point of view between classic probability theory and sampling theory is, roughly, that probability theory starts from the given parameters of a total population to deduce probabilities that pertain to samples. Statistical inference, however, moves in the opposite direction—inductively inferring from samples to the parameters of a larger or total population.
The basic steps of a statistical experiment are:
Planning the research, including finding the number of replicates of the study, using the following information: preliminary estimates regarding the size of treatment effects, alternative hypotheses, and the estimated experimental variability. Consideration of the selection of experimental subjects and the ethics of research is necessary. Statisticians recommend that experiments compare (at least) one new treatment with a standard treatment or control, to allow an unbiased estimate of the difference in treatment effects.
Design of experiments, using blocking to reduce the influence of confounding variables, and randomized assignment of treatments to subjects to allow unbiased estimates of treatment effects and experimental error. At this stage, the experimenters and statisticians write the experimental protocol that will guide the performance of the experiment and which specifies the primary analysis of the experimental data.
Performing the experiment following the experimental protocol and analyzing the data following the experimental protocol.
Further examining the data set in secondary analyses, to suggest new hypotheses for future study.
Documenting and presenting the results of the study.
Experiments on human behavior have special concerns. The famous Hawthorne study examined changes to the working environment at the Hawthorne plant of the Western Electric Company. The researchers were interested in determining whether increased illumination would increase the productivity of the assembly line workers. The researchers first measured the productivity in the plant, then modified the illumination in an area of the plant and checked if the changes in illumination affected productivity. It turned out that productivity indeed improved (under the experimental conditions). However, the study is heavily criticized today for errors in experimental procedures, specifically for the lack of a control group and blindness. The Hawthorne effect refers to finding that an outcome (in this case, worker productivity) changed due to observation itself. Those in the Hawthorne study became more productive not because the lighting was changed but because they were being observed.
Observational study
An example of an observational study is one that explores the association between smoking and lung cancer. This type of study typically uses a survey to collect observations about the area of interest and then performs statistical analysis. In this case, the researchers would collect observations of both smokers and non-smokers, perhaps through a cohort study, and then look for the number of cases of lung cancer in each group.[15] A case-control study is another type of observational study in which people with and without the outcome of interest (e.g. lung cancer) are invited to participate and their exposure histories are collected.Various attempts have been made to produce a taxonomy of levels of measurement. The psychophysicist Stanley Smith Stevens defined nominal, ordinal, interval, and ratio scales. Nominal measurements do not have meaningful rank order among values, and permit any one-to-one transformation. Ordinal measurements have imprecise differences between consecutive values, but have a meaningful order to those values, and permit any order-preserving transformation. Interval measurements have meaningful distances between measurements defined, but the zero value is arbitrary (as in the case with longitude and temperature measurements in Celsius or Fahrenheit), and permit any linear transformation. Ratio measurements have both a meaningful zero value and the distances between different measurements defined, and permit any rescaling transformation.
Because variables conforming only to nominal or ordinal measurements cannot be reasonably measured numerically, sometimes they are grouped together as categorical variables, whereas ratio and interval measurements are grouped together as quantitative variables, which can be either discrete or continuous, due to their numerical nature. Such distinctions can often be loosely correlated with data type in computer science, in that dichotomous categorical variables may be represented with the Boolean data type, polytomous categorical variables with arbitrarily assigned integers in the integral data type, and continuous variables with the real data type involving floating point computation. But the mapping of computer science data types to statistical data types depends on which categorization of the latter is being implemented.
Other categorizations have been proposed. For example, Mosteller and Tukey (1977)[distinguished grades, ranks, counted fractions, counts, amounts, and balances. Nelder (1990)[described continuous counts, continuous ratios, count ratios, and categorical modes of data. See also Chrisman (1998), van den Berg (1991). The issue of whether or not it is appropriate to apply different kinds of statistical methods to data obtained from different kinds of measurement procedures is complicated by issues concerning the transformation of variables and the precise interpretation of research questions. "The relationship between the data and what they describe merely reflects the fact that certain kinds of statistical statements may have truth values which are not invariant under some transformations. Whether or not a transformation is sensible to contemplate depends on the question one is trying to answer".Consider independent identically distributed (IID) random variables with a given probability distribution: standard statistical inference and estimation theory defines a random sample as the random vector given by the column vector of these IID variables. The population being examined is described by a probability distribution that may have unknown parameters.
A statistic is a random variable that is a function of the random sample, but not a function of unknown parameters. The probability distribution of the statistic, though, may have unknown parameters.
Consider now a function of the unknown parameter: an estimator is a statistic used to estimate such function. Commonly used estimators include sample mean, unbiased sample variance and sample covariance.
A random variable that is a function of the random sample and of the unknown parameter, but whose probability distribution does not depend on the unknown parameter is called a pivotal quantity or pivot. Widely used pivots include the z-score, the chi square statistic and Student's t-value.
Between two estimators of a given parameter, the one with lower mean squared error is said to be more efficient. Furthermore, an estimator is said to be unbiased if its expected value is equal to the true value of the unknown parameter being estimated, and asymptotically unbiased if its expected value converges at the limit to the true value of such parameter.
Other desirable properties for estimators include: UMVUE estimators that have the lowest variance for all possible values of the parameter to be estimated (this is usually an easier property to verify than efficiency) and consistent estimators which converges in probability to the true value of such parameter.
This still leaves the question of how to obtain estimators in a given situation and carry the computation, several methods have been proposed: the method of moments, the maximum likelihood method, the least squares method and the more recent method of estimating equations.
9 June 2011 - Vienna
Isabelle Rivals discussing the Bayesian inference for the study of low-level radioactivity in the environment during the Science and Technology Conference 2011.
Copyright CTBTO Preparatory Commission
Photographer: Marianne Weiss
9 June 2011 - Vienna
Isabelle Rivals discussing the Bayesian inference for the study of low-level radioactivity in the environment during the Science and Technology Conference 2011.
Copyright CTBTO Preparatory Commission
Photographer: Marianne Weiss
Panduan Teknik Membuat Robot Buku Perancangan Robotika Modern Edisi Lengkap : Robotika adalah satu cabang teknologi yang berhubungan dengan desain konstruksi operasi disposisi struktural pembuatan dan aplikasi dari robot Robotika terkait dengan ilmu pengetahuan bidang elektronika mesin mekanika dan perangkat lunak komputer Robot adalah seperangkat alat mekanik yang bisa melakukan tugas fisik baik dengan pengawasan dan kontrol manusia ataupun menggunakan program yang telah didefinisikan terlebih dulu kecerdasan buatan Istilah robot berawal bahasa Ceko robota yang berarti pekerja atau kuli yang tidak mengenal lelah atau bosan Robot biasanya digunakan untuk tugas yang berat berbahaya pekerjaan yang berulang dan kotor Biasanya kebanyakan robot industri digunakan dalam bidang produksi Penggunaan robot lainnya termasuk untuk pembersihan limbah beracun penjelajahan bawah air dan luar angkasa pertambangan pekerjaan cari dan tolong search and rescue dan untuk pencarian tambang Belakangan ini robot mulai memasuki pasaran konsumen di bidang hiburan dan alat pembantu rumah tangga seperti penyedot debu, dan pemotong rumput Pemikiran tentang pembuatan mesin yang dapat bekerja sendiri telah ada sejak Era Klasik namun riset mengenai penggunaannya tidak berkembang secara berarti sampai abad ke-20 Kini banyak robot melakukan pekerjaan yang berbahaya bagi manusia seperti menjinakkan bom menjelajahi kapal karam dan pertambangan Saat ini hampir tidak ada orang yang tidak mengenal robot namun pengertian robot tidaklah dipahami secara sama oleh setiap orang Sebagian membayangkan robot adalah suatu mesin tiruan manusia humanoid meski demikian humanoid bukanlah satu-satunya jenis robot
Buku Pintar Robotika : Melanjutkan buku pertama Build Your Own Line Follower Robot buku Robotika Panduan Belajar dan Pelatihan Robotika ditulis dalam rangka mengenalkan dan mengembangkan ilmu robotika di Indonesia Meskipun sederhana dan dengan pembahasan tingkat dasar Buku Pintar Robotika ini mampu memberikan informasi lengkap kepada pembaca mengenai ilmu robotika Buku Pintar Robotika ini membahas beberapa hal mengenai ilmu robotika pengenalan dasar ilmu robotika, pengenalan komponen dasar elektronika pengenalan catu daya power supply stabil pengenalan elektronika digital pengenalan sirkuit terpadu integrated circuits IC baik IC analog tidak terprogram maupun IC digital terprogram pengenalan dan pembuatan sensor pada suatu robot pengenalan jenis perangkat pengendali pada robot pengenalan IC mikrokontroler pengenalan penggerak motor motor driver pengenalan peralatan praktikum robotika garisbuku.com/shop/buku-pintar-robotika/ pengenalan dan pembuatan robot pengikut cahaya light follower robot dan robot pengikut garis line follower robot dan terakhir pengenalan beberapa kontes robot yang pernah diselenggarakan serta tip dan trik untuk mengikuti kontes robot Buku Pintar Robotika ini sangat sesuai bagi pembaca dari berbagai kalangan yang tertarik untuk mempelajari ilmu robotika mulai dari pelajar SD SMP SMA SMK pehobi robotika pemula mahasiswa masyarakat umum guru sampai trainer tentor pelatihan robotika dari berbagai lembaga pelatihan keterampilan SDM Untuk para guru dosen atau pelatih Buku Pintar Robotika ini dapat digunakan sebagai buku panduan belajar ilmu robotika dan panduan pelatihan Untuk para siswa atau mahasiswa yang ingin mengikuti kontes robot pengikut garis atau pengikut cahaya atau juga Kontes Robot Cerdas Indonesia KRCI Buku Pintar Robotika ini dapat digunakan sebagai panduan awal dalam belajar robotika Secara umum pembahasan buku ini adalah sebagai berikut Pengenalan Robotika Komponen Dasar Elektronika Catu Daya Power Supply Elektronika Digital Sirkuit Terpadu Integrated Circuits Sensor Peranti Pengendali Robot Mikrokontroler Penggerak Motor Peralatan Praktikum Robotika Robot Pengikut Cahaya Robot Pengikut Garis dan Kontes Robot.
Panduan Praktis Membuat Robot Cerdas Menggunakan Arduino Dan Matlab : Buku Panduan Praktis Membuat Robot Cerdas Menggunakan Arduino Dan Matlab ini tidak menjelaskan teori yang berat tetapi menjelaskan metode praktis untuk membangun robot cerdas. Buku Panduan Praktis Membuat Robot Cerdas Menggunakan Arduino Dan Matlab ini dilengkapi dengan CD yang berisi simulasi Arduino menggunakan Proteus dan pemrograman soft computing Matlab garisbuku.com/shop/panduan-praktis-membuat-robot-cerdas-m... Buku Panduan Praktis Membuat Robot Cerdas Menggunakan Arduino Dan Matlab ini tidak menjelaskan teori yang berat tetapi menjelaskan metode praktis untuk membangun robot cerdas. Buku Panduan Praktis Membuat Robot Cerdas Menggunakan Arduino Dan Matlab ini dilengkapi dengan CD yang berisi simulasi Arduino menggunakan Proteus dan pemrograman soft computing Matlab.
Teori Dan Implementasi Robotika Modern : Buku Robotika Modern, Teori dan Implementasi ini sangat sangat tepat dibaca oleh pelajar, mahasiswa dan peneliti di bidang Robotika. Buku ini memberikan gambaran lengkap konsep robot dan implementasinya ini layak dimiliki karena selain menggunakan teknologi robotika terkini, dibahas pula prgraom computer vision untuk pengolahan citra dan pengenalan wajah menggunakan OpenCV dan FLTK. Buku ini merupakan satu-satunya buku yang membahas konsep dan implementasi robotika modern berbasis vision yang paling lengkap di Indonesia garisbuku.com/shop/robotika-modern-teori-dan-implementasi... Buku Robotika Modern, Teori dan Implementasi ini sangat sangat tepat dibaca oleh pelajar, mahasiswa dan peneliti di bidang Robotika. Buku ini memberikan gambaran lengkap konsep robot dan implementasinya ini layak dimiliki karena selain menggunakan teknologi robotika terkini, dibahas pula prgraom computer vision untuk pengolahan citra dan pengenalan wajah menggunakan OpenCV dan FLTK. Buku ini merupakan satu-satunya buku yang membahas konsep dan implementasi robotika modern berbasis vision yang paling lengkap di Indonesia
Panduan Praktis Membuat Robotik Dengan Pemrograman C++ : Bagian dasar pemrograman mengulas tentang bahasa atau kode pemrograman, penulis mengemukakan alasan megapa membuat program pengendalian robot dengan robomind dapat dikatakan mudah, karena Struktur bahasa pemrograman pada robomind sangat mirip dengan struktur bahasa dalam bahasa pemrograman basic ataupun pemrograman C Sehingga bagi pembaca yang sudah mengenal bahasa pemrograman tersebut dapat dipastikan tidak akan menemui kesulitan dalam membuat program dengan robomind Bahasa yang digunakan dalam instruksi-instruksi robomind menggunakan bahasa inggris sehingga tidak sulit untuk memahami alur program Bahasa program dalam robomind berorientasi pada efek pengendalian robot yang dihasilkan. Sehingga perintah-perintah yang digunakan sangan sederhana, yaitu menggunakan yang biasa digunakan oleh manusia. Oleh sebab itu robomind adalah bahasa pemrograman yang manusiawi misal instruksi forward(n), backward(n), left, right, pickUp, putDown, dan sebagainya Tidak banyak menggunakan perhitungan atau formula matematika yang rumit seperti halnya dalam bahasa pemrograman basic atau C. Namun perlu diingat dalam penulisan kode program atau instruksi program dalam robomind bersifat case-sensitive, sehingga perlu diperhatikan dalam penulisan program ketika menggunakan huruf besar atau huruf kecil Kelebihan dari buku ini adalah yang pertama dilihat dari tampilan ataupun sampul dari buku itu sendiri sangat menarik dengan perpaduan warna yang baik serta tampilan gambar yang memperlihatkan bentuk suatu robot garisbuku.com/shop/panduan-praktis-membuat-robotik-dengan... Bagian dasar pemrograman mengulas tentang bahasa atau kode pemrograman, penulis mengemukakan alasan megapa membuat program pengendalian robot dengan robomind dapat dikatakan mudah, karena Struktur bahasa pemrograman pada robomind sangat mirip dengan struktur bahasa dalam bahasa pemrograman basic ataupun pemrograman C Sehingga bagi pembaca yang sudah mengenal bahasa pemrograman tersebut dapat dipastikan tidak akan menemui kesulitan dalam membuat program dengan robomind Bahasa yang digunakan dalam instruksi-instruksi robomind menggunakan bahasa inggris sehingga tidak sulit untuk memahami alur program Bahasa program dalam robomind berorientasi pada efek pengendalian robot yang dihasilkan. Sehingga perintah-perintah yang digunakan sangan sederhana, yaitu menggunakan yang biasa digunakan oleh manusia. Oleh sebab itu robomind adalah bahasa pemrograman yang manusiawi misal instruksi forward(n), backward(n), left, right, pickUp, putDown, dan sebagainya Tidak banyak menggunakan perhitungan atau formula matematika yang rumit seperti halnya dalam bahasa pemrograman basic atau C. Namun perlu diingat dalam penulisan kode program atau instruksi program dalam robomind bersifat case-sensitive, sehingga perlu diperhatikan dalam penulisan program ketika menggunakan huruf besar atau huruf kecil Kelebihan dari buku ini adalah yang pertama dilihat dari tampilan ataupun sampul dari buku itu sendiri sangat menarik dengan perpaduan warna yang baik serta tampilan gambar yang memperlihatkan bentuk suatu robot.
Robot B.E.A.M Biology Electronics Aesthetics Mechanics : Buku ini mengenalkan sebuah konsep ”luar biasa” dalam pembuatan robot. Konsep yang dapat memberikan pemahaman mengenai penerapan ilmu elektronika dalam pembangunan sistem elektronik dan sistem pengendalian suatu robot. Selain itu konsep ini juga memasukkan unsur alam sebagai sumber inspirasi pembuatan desain mekanik robot. Konsep tersebut bernama konsep biology, electronics, aesthetics, danmechanicsatau disingkat dengan BEAM Mengapa Saya katakan konsep ini luar biasa, karena konsep ini sederhana akan tetapi kontribusinya terhadap pengembangan robotika sungguh sangat besar.Anda tidak akan paham mengenai konsep ini jika hanya membaca kata pengantar atau sinopsis buku ini. Untuk dapat memahami kosep ini secara lengkap, maka baca buku ini kemudian praktekkan apa yang telah Anda pelajari dari buku Robot B.E.A.M Biology Electronics Aesthetics Mechanics ini Buku ini diperuntukkan bagi siapa saja yang tertarik belajar robotika dan ingin menjadi salah satu pengembang developer ilmu robot di Indonesia garisbuku.com/shop/robot-b-e-a-m-biology-electronics-aest... Buku ini mengenalkan sebuah konsep ”luar biasa” dalam pembuatan robot. Konsep yang dapat memberikan pemahaman mengenai penerapan ilmu elektronika dalam pembangunan sistem elektronik dan sistem pengendalian suatu robot. Selain itu konsep ini juga memasukkan unsur alam sebagai sumber inspirasi pembuatan desain mekanik robot. Konsep tersebut bernama konsep biology, electronics, aesthetics, danmechanicsatau disingkat dengan BEAM Mengapa Saya katakan konsep ini luar biasa, karena konsep ini sederhana akan tetapi kontribusinya terhadap pengembangan robotika sungguh sangat besar.Anda tidak akan paham mengenai konsep ini jika hanya membaca kata pengantar atau sinopsis buku ini. Untuk dapat memahami kosep ini secara lengkap, maka baca buku ini kemudian praktekkan apa yang telah Anda pelajari dari buku Robot B.E.A.M Biology Electronics Aesthetics Mechanics ini Buku ini diperuntukkan bagi siapa saja yang tertarik belajar robotika dan ingin menjadi salah satu pengembang developer ilmu robot di Indonesia.
Panduan Praktis Perancangan Dan Pemrograman Hasta Karya Robot : Proyek hasta karya robot merupakan hal menarik bagi pelajar dan penghobi elektronika Buku Perancangan & Pemrograman Hasta Karya Robot ini memberikan panduan lengkap bagaimana merancang dan membuat robot dari yang paling sederhana hingga berbasiskan mikrokontrolerhandal dan murah Buku Perancangan & Pemrograman Hasta Karya Robot ini juga penuh dengan berbagai trik membuat robot dan teknologi terkini robot, sangat cocok untuk pelajar SD untuk keperluan lomba hingga mahasiswa dan peneliti Isi Buku Perancangan & Pemrograman Hasta Karya Robot ini membahas Konsep robotika dan mikrokontroler Robot line follower untuk lomba Robot line follower berbasis AVR Robot avoider dan lengan robot Robot hexapod dan lengan robot Robot dengan computer vision Robot pemadam api KRCI Robot berbicara Intelligent Telepresence Robot garisbuku.com/shop/panduan-praktis-perancangan-dan-pemrog... Proyek hasta karya robot merupakan hal menarik bagi pelajar dan penghobi elektronika Buku Perancangan & Pemrograman Hasta Karya Robot ini memberikan panduan lengkap bagaimana merancang dan membuat robot dari yang paling sederhana hingga berbasiskan mikrokontrolerhandal dan murah Buku Perancangan & Pemrograman Hasta Karya Robot ini juga penuh dengan berbagai trik membuat robot dan teknologi terkini robot, sangat cocok untuk pelajar SD untuk keperluan lomba hingga mahasiswa dan peneliti Isi Buku Perancangan & Pemrograman Hasta Karya Robot ini membahas Konsep robotika dan mikrokontroler Robot line follower untuk lomba Robot line follower berbasis AVR Robot avoider dan lengan robot Robot hexapod dan lengan robot Robot dengan computer vision Robot pemadam api KRCI Robot berbicara Intelligent Telepresence Robot.
ROBOT VISION : Teknik Membangun Robot Cerdas Masa Depan Buku Robot Vision ini sangat tepat dibaca oleh pelajar dan peneliti di bidang robotika, elektronika, dan sistem pengaturan. Buku ini memberikan gambaran lengkap tentang konsep robotika, robot vision, dan implementasinya. Layak dimiliki karena langsung diimplementasikan untuk menghasilkan sebuah robot cerdas berbasis visi masa depan. Berisi materi, antara lain konsep robotika dan robot vision pemrograman robot menggunakan mikrokontroler Propeller computer vision dengan OpenCV dan EmguCV pemrograman robot dan stereo vision navigasi pada robot implementasi robot vision garisbuku.com/shop/robot-vision-teknik-membangun-robot-ce... Teknik Membangun Robot Cerdas Masa Depan Buku Robot Vision ini sangat tepat dibaca oleh pelajar dan peneliti di bidang robotika, elektronika, dan sistem pengaturan. Buku ini memberikan gambaran lengkap tentang konsep robotika, robot vision, dan implementasinya. Layak dimiliki karena langsung diimplementasikan untuk menghasilkan sebuah robot cerdas berbasis visi masa depan. Berisi materi, antara lain konsep robotika dan robot vision pemrograman robot menggunakan mikrokontroler Propeller computer vision dengan OpenCV dan EmguCV pemrograman robot dan stereo vision navigasi pada robot implementasi robot vision.
Panduan Mudah Pemrograman Robot : Sesuai judulnya, Panduan Mudah Pemrograman Robot, buku ini diperuntukkan bagi siapa saja yang tertarik untuk belajar memprogram robot, mulai dari para pelajar SD, SMP, SMA/SMK, penghobi robotika pemula, mahasiswa, masyarakat umum, sampai dengan para guru (SD, SMP, & SMA/K Konsep dasar buku ini adalah sebagai buku panduan belajar pemrograman pengendalian robot. Buku ini menjelaskan secarasederhana mengenai berberapa hal yang berkaitan dengan langkah-langkah pembuatan program pengendalian robot sehingga akan memunculkan pemahaman dasar yang lengkap. Setelah membaca buku ini pembaca dapat langsung mempraktekkan materi-materi dalam buku ini sehingga dapat membuat program pengendalian robot sendiri. Contoh-contoh program yang diberikan cukup beragam serta menggunakan hampir semua pustaka lapangan (*.map) yang disediakan pada software RoboMind garisbuku.com/shop/panduan-mudah-pemrograman-robot/ Sesuai judulnya, Panduan Mudah Pemrograman Robot, buku ini diperuntukkan bagi siapa saja yang tertarik untuk belajar memprogram robot, mulai dari para pelajar SD, SMP, SMA/SMK, penghobi robotika pemula, mahasiswa, masyarakat umum, sampai dengan para guru (SD, SMP, & SMA/K Konsep dasar buku ini adalah sebagai buku panduan belajar pemrograman pengendalian robot. Buku ini menjelaskan secarasederhana mengenai berberapa hal yang berkaitan dengan langkah-langkah pembuatan program pengendalian robot sehingga akan memunculkan pemahaman dasar yang lengkap. Setelah membaca buku ini pembaca dapat langsung mempraktekkan materi-materi dalam buku ini sehingga dapat membuat program pengendalian robot sendiri. Contoh-contoh program yang diberikan cukup beragam serta menggunakan hampir semua pustaka lapangan (*.map) yang disediakan pada software RoboMind.
Membuat Robot Cerdas Berbasis Vision : Membuat Robot Cerdas Berbasis Vision Menggunakan MATLAB dan CodeVisionAVR Robot vision dan komputer vision merupakan teknologi cerdas masa depan. Saat ini pun, komputer dan robot vision telah berkembang pesat seperti pada fingerprint untuk absensi otomatis, deteksi wajah pada Facebook, sistem pengenalan wajah yang digunakan di Airport dan kepolisian, sistem pendeteksi senyum pada kamera digital, sortasi kualitas produk, robot humanoid ASIMO, robot sosial KISMET, serta robot NASA Rover untuk memonitor planet Mars Terdapat empat bagian utama dalam buku ini, yaitu Dasar-Dasar Robotika, Komputer Vision Berbasis MATLAB, Robot Vision Berbasis MATLAB, dan Kontrol Cerdas Berbasis Soft Computing Dalam bagian pertama, kita akan mempelajari mekanika robot, elektronika robot, dasar pemrograman robot digital seperti robot kontrol digital, robot kontrol wireless, robot pengikut garis dan penghindar halangan berbasis sensor Untuk bagian kedua, kita akan mempelajari pemrograman MATLAB untuk pengolahan citra dan video, deteksi warna, deteksi kulit, deteksi wajah dan bagian wajah, deteksi garis, dan deteksi gerak menggunakan webcam Bagian ketiga, kita akan membahas dasar interfacing komputer dan mikrokontroler, robot kontrol menggunakan keyboard dan GUI MATLAB, robot yang dapat mengirimkan video dan suhu lingkungan secara real-time, robot pengenal dan pengikut objek berwarna, robot vision penghindar halangan, serta robot pengikut garis berbasis webcam Bagian terakhir, kita akan mempelajari implementasi kontrol robot cerdas berbasis logika fuzzy dan ANFIS (Adaptive Neuro-Fuzzy Inferense System) untuk robot vision pendeteksi objek Buku Membuat Robot Cerdas Berbasis Vision ini dilengkapi juga dengan CD berisi program MATLAB, CodeVisionAVR, dan simulasinya menggunakan Proteus untuk tiap robot yang dibuat untuk lebih membantu pembaca. Bersama Bolabot Techno Robotic Institute, mari kita berkreasi untuk kebangkitan teknologi Indonesia garisbuku.com/shop/membuat-robot-cerdas-berbasis-vision-m... Membuat Robot Cerdas Berbasis Vision Menggunakan MATLAB dan CodeVisionAVR Robot vision dan komputer vision merupakan teknologi cerdas masa depan. Saat ini pun, komputer dan robot vision telah berkembang pesat seperti pada fingerprint untuk absensi otomatis, deteksi wajah pada Facebook, sistem pengenalan wajah yang digunakan di Airport dan kepolisian, sistem pendeteksi senyum pada kamera digital, sortasi kualitas produk, robot humanoid ASIMO, robot sosial KISMET, serta robot NASA Rover untuk memonitor planet Mars Terdapat empat bagian utama dalam buku ini, yaitu Dasar-Dasar Robotika, Komputer Vision Berbasis MATLAB, Robot Vision Berbasis MATLAB, dan Kontrol Cerdas Berbasis Soft Computing Dalam bagian pertama, kita akan mempelajari mekanika robot, elektronika robot, dasar pemrograman robot digital seperti robot kontrol digital, robot kontrol wireless, robot pengikut garis dan penghindar halangan berbasis sensor Untuk bagian kedua, kita akan mempelajari pemrograman MATLAB untuk pengolahan citra dan video, deteksi warna, deteksi kulit, deteksi wajah dan bagian wajah, deteksi garis, dan deteksi gerak menggunakan webcam Bagian ketiga, kita akan membahas dasar interfacing komputer dan mikrokontroler, robot kontrol menggunakan keyboard dan GUI MATLAB, robot yang dapat mengirimkan video dan suhu lingkungan secara real-time, robot pengenal dan pengikut objek berwarna, robot vision penghindar halangan, serta robot pengikut garis berbasis webcam Bagian terakhir, kita akan mempelajari implementasi kontrol robot cerdas berbasis logika fuzzy dan ANFIS (Adaptive Neuro-Fuzzy Inferense System) untuk robot vision pendeteksi objek Buku Membuat Robot Cerdas Berbasis Vision ini dilengkapi juga dengan CD berisi program MATLAB, CodeVisionAVR, dan simulasinya menggunakan Proteus untuk tiap robot yang dibuat untuk lebih membantu pembaca. Bersama Bolabot Techno Robotic Institute, mari kita berkreasi untuk kebangkitan teknologi Indonesia.
Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino : Terdapat empat bagian utama dalam buku Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino ini yaitu Dasar-dasar Robotika Arduino Komputer Vision Berbasis MATLAB Robot Vision Berbasis MATLAB Kontrol Cerdas Berbasis Soft Computing Dalam bagian pertama pada Buku Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino ini kita akan mempelajari mekanika robot, elektronika robot, dasar pemrograman robot berbasis Arduino, seperti robot line follower, robot avoider obstacle berbasis sensor ultrasonic, robot digital menggunakan control komputer, robot control berbasis Bluetooth, dan robot dengan control GUI (Graphical User Interface) Untuk bagian kedua pada buku Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino ini, kita akan mempelajari pemrograman MATLAB untuk image dan video processing, color detection, skin detection, face dan face part detection, lline detection, serta motion detection secara real time menggunakan webcam Bagian ketiga pada buku Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino kita akan membahas dasar interfacing komputer dan mikrokontroler, robot control menggunakan PC dan GUI MATLAB yang dapat mengirim video secara real time (EyeBOTIC Control & Monitoring), robot pengenal dan pengikut objek berwarna (EyeBOTIC Color Tracer) Aplikasi laser-webcam Range Finder pada robot obstacle avoider serta robot line follower berbasis webcam (EyeBOTIC Line Tracer) Bagian Terakhir dalam buku Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino kita akan mempelajari implementasi control cerdas berbasis control logika fuzzy (fuzzy logic control). ANN (Artificial neural Network) dan ANFIS (Adaptive neuro-Fuzzy Inferense Systems) untuk robot vision pendeteksi objek garisbuku.com/shop/panduan-praktis-pemrograman-robot-visi... Terdapat empat bagian utama dalam buku Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino ini yaitu Dasar-dasar Robotika Arduino Komputer Vision Berbasis MATLAB Robot Vision Berbasis MATLAB Kontrol Cerdas Berbasis Soft Computing Dalam bagian pertama pada Buku Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino ini kita akan mempelajari mekanika robot, elektronika robot, dasar pemrograman robot berbasis Arduino, seperti robot line follower, robot avoider obstacle berbasis sensor ultrasonic, robot digital menggunakan control komputer, robot control berbasis Bluetooth, dan robot dengan control GUI (Graphical User Interface) Untuk bagian kedua pada buku Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino ini, kita akan mempelajari pemrograman MATLAB untuk image dan video processing, color detection, skin detection, face dan face part detection, lline detection, serta motion detection secara real time menggunakan webcam Bagian ketiga pada buku Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino kita akan membahas dasar interfacing komputer dan mikrokontroler, robot control menggunakan PC dan GUI MATLAB yang dapat mengirim video secara real time (EyeBOTIC Control & Monitoring), robot pengenal dan pengikut objek berwarna (EyeBOTIC Color Tracer) Aplikasi laser-webcam Range Finder pada robot obstacle avoider serta robot line follower berbasis webcam (EyeBOTIC Line Tracer) Bagian Terakhir dalam buku Panduan Praktis Pemrograman Robot Vision Menggunakan Matlab Dan IDE Arduino kita akan mempelajari implementasi control cerdas berbasis control logika fuzzy (fuzzy logic control). ANN (Artificial neural Network) dan ANFIS (Adaptive neuro-Fuzzy Inferense Systems) untuk robot vision pendeteksi objek.
Robot Vision Teknik Membangun Robot Cerdas Masa Depan : Robot Vision Teknik Membangun Robot Cerdas Masa Depan Edisi Revisi Buku Robot Vision ini sangat tepat dibaca oleh pelajar an peneliti dibidang Robotika, Elektronika, dan teknik informatika. Buku Buku Robot Vision edisi revisi ini merupakan buku pegangan utama pada mata kuliah Robotika, Kecerdasan Buatan, serta Robot vision Menyajikan gambaran lengkap mengenai konsep robotika, robot vision, dan implementasi, Buku Robot Vision ini layak menjadi pegangan wajib bagi penggiat dunia robotika, terutama untuk merancang robot cerdas berbasis vision Materi yang disajikan dalam Buku Robot Vision ini Konsep robotika dan robot vision Pemrograman robot menggunakan mikrokontroler Propeller Computer Vision dengan OpenCV dan EmguCV Pemrograman Robot dan Stereo vision Navigasi Robot bImplementasi Robot Vision garisbuku.com/shop/robot-vision-teknik-membangun-robot-ce... Robot Vision Teknik Membangun Robot Cerdas Masa Depan Edisi Revisi Buku Robot Vision ini sangat tepat dibaca oleh pelajar an peneliti dibidang Robotika, Elektronika, dan teknik informatika. Buku Buku Robot Vision edisi revisi ini merupakan buku pegangan utama pada mata kuliah Robotika, Kecerdasan Buatan, serta Robot vision Menyajikan gambaran lengkap mengenai konsep robotika, robot vision, dan implementasi, Buku Robot Vision ini layak menjadi pegangan wajib bagi penggiat dunia robotika, terutama untuk merancang robot cerdas berbasis vision Materi yang disajikan dalam Buku Robot Vision ini Konsep robotika dan robot vision Pemrograman robot menggunakan mikrokontroler Propeller Computer Vision dengan OpenCV dan EmguCV Pemrograman Robot dan Stereo vision Navigasi Robot bImplementasi Robot Vision.
Robot Cerdas Berbasis Speech Recognition : Robot Cerdas Berbasis Speech Recognititon Menggunakan Matlab Dan Arduino Buku Robot Cerdas Berbasis Speech Recognititon ini tidak menjelaskan teori yang berat tetapi menjelaskan metode praktis untuk membangun robot cerdas. Buku Robot Cerdas Berbasis Speech Recognititon ini dilengkapi dengan CD yang berisikan Arduino menggunakan Proteus dan pemrograman Soft Computing MATLAB garisbuku.com/shop/robot-cerdas-berbasis-speech-recogniti... Robot Cerdas Berbasis Speech Recognititon Menggunakan Matlab Dan Arduino Buku Robot Cerdas Berbasis Speech Recognititon ini tidak menjelaskan teori yang berat tetapi menjelaskan metode praktis untuk membangun robot cerdas. Buku Robot Cerdas Berbasis Speech Recognititon ini dilengkapi dengan CD yang berisikan Arduino menggunakan Proteus dan pemrograman Soft Computing MATLAB.
Efek Animasi Robot : Efek Animasi Robot Ekspresikan Fantasimu Di Dunia Robot Dengan Adobe Flash CS4 Siapa yang tidak menyukai film animasi robot? Animasi robot hampir disukai semua kalangan baik dari anak-anak, remaja, bahkan orang dewasa. Animasi robot menyajikan sebuah karya teknologi yang dipadukan dengan imaginasi si pembuatnya Buku Efek Animasi Robot ini akan membuka wawasan mengenal efek-efek pembuatan animasi robot yang biasa digunakan pada film-film animasi. Asyiknya, Anda juga akan dikenalkan dengan teknik bagaimana membuat gambar menjadi sebuah animasi yang hidup. Teknik-teknik tersebut wajib Anda kuasai Dengan menguasai teknik-teknik tersebut, daya saing Anda dalam dunia bisnis animasi akan semakin naik. Anda akan mampu menghasilkan karya layaknya animator professional Sebenarnya, teknik-teknik animasi ini juga dapat Anda gunakan untuk karya animasi tema lain. Karya tersebut dapat Anda publikasikan dalam bentuk clip, animasi web, iklan, maupun presentasi. Dengan menggunakan teknik animasi ini, karya Anda akan terlihat semakin high tech style garisbuku.com/shop/efek-animasi-robot-ekspresikan-fantasi... Efek Animasi Robot Ekspresikan Fantasimu Di Dunia Robot Dengan Adobe Flash CS4 Siapa yang tidak menyukai film animasi robot? Animasi robot hampir disukai semua kalangan baik dari anak-anak, remaja, bahkan orang dewasa. Animasi robot menyajikan sebuah karya teknologi yang dipadukan dengan imaginasi si pembuatnya Buku Efek Animasi Robot ini akan membuka wawasan mengenal efek-efek pembuatan animasi robot yang biasa digunakan pada film-film animasi. Asyiknya, Anda juga akan dikenalkan dengan teknik bagaimana membuat gambar menjadi sebuah animasi yang hidup. Teknik-teknik tersebut wajib Anda kuasai Dengan menguasai teknik-teknik tersebut, daya saing Anda dalam dunia bisnis animasi akan semakin naik. Anda akan mampu menghasilkan karya layaknya animator professional Sebenarnya, teknik-teknik animasi ini juga dapat Anda gunakan untuk karya animasi tema lain. Karya tersebut dapat Anda publikasikan dalam bentuk clip, animasi web, iklan, maupun presentasi. Dengan menggunakan teknik animasi ini, karya Anda akan terlihat semakin high tech style
Multirotor Modeling Designing Building : Buku Multirotor (Modeling-Designing-Building) Buku ini mengenalkan dan menjelaskan kepada para pembaca tentang salah satu jenis kendaraan udara tanpa awak (Umanned Aerial Vehicle, UAV) yang memiliki actuator berupa beberapa motor DC brushless yang dirangkai dengan baling-baling (propeller). UAV jenis ini sering disebut dengan multicopter atau multirotor. Buku Multirotor ini cocok bagi pembaca yang sedang mencari referensi atau pengetahuan mengenai dasar-dasar pembangunan system multirotor. Buku Multirotor ini dapat digunakan oleh siapa saja yang tertarik belajar tentang ilmu rpbot terbang (UAV), mulai dari para pelajar usia sekolah SMA/SMK, pehobi robotika, mahasiswa, masyarakat umum, guru SMA/SMK, sampai dengan doses perguruan tinggi garisbuku.com/shop/multirotor-modeling-designing-building/ Buku Multirotor (Modeling-Designing-Building) Buku ini mengenalkan dan menjelaskan kepada para pembaca tentang salah satu jenis kendaraan udara tanpa awak (Umanned Aerial Vehicle, UAV) yang memiliki actuator berupa beberapa motor DC brushless yang dirangkai dengan baling-baling (propeller). UAV jenis ini sering disebut dengan multicopter atau multirotor. Buku Multirotor ini cocok bagi pembaca yang sedang mencari referensi atau pengetahuan mengenai dasar-dasar pembangunan system multirotor. Buku Multirotor ini dapat digunakan oleh siapa saja yang tertarik belajar tentang ilmu rpbot terbang (UAV), mulai dari para pelajar usia sekolah SMA/SMK, pehobi robotika, mahasiswa, masyarakat umum, guru SMA/SMK, sampai dengan doses perguruan tinggi.
Artificial Intelligence : Konsep Dan Penerapan Artificial Intelligence Buku Artificial Intelligence ini ditujukan bagi semua kalangan yang berkeinginan untuk mengetahui tentang kecerdasan buatan Konsep dari berbagai sub ilmu dari kecerdasan buatan, dan sebagian besar dari babnya disertai dengan penerapan konsep berupa contoh code, aplikasi atau case study Buku Artificial Intelligence ini disusun menjadi 17 bab, yaitu Kecerdasan Buatan Searching First Order Logic Planning Representasi Pengetahuan Probabilitas Bayesian Probabilitas Markov Version Space Sistem Pakar Logika Fuzzy Neural Network Genetic Algorithm Natural Language Processing Computer Vision Robotika Pemrograman Dasar Robot Implementasi Robot Vision garisbuku.com/shop/artificial-intelligence-konsep-dan-pen... Konsep Dan Penerapan Artificial Intelligence Buku Artificial Intelligence ini ditujukan bagi semua kalangan yang berkeinginan untuk mengetahui tentang kecerdasan buatan Konsep dari berbagai sub ilmu dari kecerdasan buatan, dan sebagian besar dari babnya disertai dengan penerapan konsep berupa contoh code, aplikasi atau case study Buku Artificial Intelligence ini disusun menjadi 17 bab, yaitu Kecerdasan Buatan Searching First Order Logic Planning Representasi Pengetahuan Probabilitas Bayesian Probabilitas Markov Version Space Sistem Pakar Logika Fuzzy Neural Network Genetic Algorithm Natural Language Processing Computer Vision Robotika Pemrograman Dasar Robot Implementasi Robot Vision.
Robotika adalah satu cabang teknologi yang berhubungan dengan desain konstruksi operasi disposisi struktural pembuatan dan aplikasi dari robot Robotika terkait dengan ilmu pengetahuan bidang elektronika mesin mekanika dan perangkat lunak komputer Robot adalah seperangkat alat mekanik yang bisa melakukan tugas fisik baik dengan pengawasan dan kontrol manusia ataupun menggunakan program yang telah didefinisikan terlebih dulu kecerdasan buatan Istilah robot berawal bahasa Ceko robota yang berarti pekerja atau kuli yang tidak mengenal lelah atau bosan Robot biasanya digunakan untuk tugas yang berat berbahaya pekerjaan yang berulang dan kotor Biasanya kebanyakan robot industri digunakan dalam bidang produksi Penggunaan robot lainnya termasuk untuk pembersihan limbah beracun penjelajahan bawah air dan luar angkasa pertambangan pekerjaan cari dan tolong search and rescue dan untuk pencarian tambang Belakangan ini robot mulai memasuki pasaran konsumen di bidang hiburan dan alat pembantu rumah tangga seperti penyedot debu, dan pemotong rumput Pemikiran tentang pembuatan mesin yang dapat bekerja sendiri telah ada sejak Era Klasik namun riset mengenai penggunaannya tidak berkembang secara berarti sampai abad ke-20 Kini banyak robot melakukan pekerjaan yang berbahaya bagi manusia seperti menjinakkan bom menjelajahi kapal karam dan pertambangan Saat ini hampir tidak ada orang yang tidak mengenal robot namun pengertian robot tidaklah dipahami secara sama oleh setiap orang Sebagian membayangkan robot adalah suatu mesin tiruan manusia humanoid meski demikian humanoid bukanlah satu-satunya jenis robot
"VISIT : TOKO BUKU ONLINE"
[Stomorhina Rondani 1861: 9 (IT: 1) spp]
[Senna Miller 1754: 284 (IT: 2) spp]
Rhiniidæ is a well-corroborated clade, and its recent removal from Calliphoridæ is supported by molecular data. Although its precise phylogenetic placement remains unstable, the family status is advisable, as recent analyses removed this taxon from the other members of traditional Calliphoridæ. Rhiniidæ never form a clade with any of the calliphorid sff, being either the sister group to a clade consisting of tachinids, rhinophorids and calliphorids (max likelihood & Bayesian) or sister group to a clade including the oestrids along with tachinids, rhinophorids and calliphorids.
REFERENCES
Phylogeny of melanopsin in C. milii and other vertebrates.Phylogenetic analyses based on a codon-matched nucleotide alignment of elephant shark opn4 cDNA sequences compared to the melanopsin sequences of representative chordates and the published visual and non-visual photosensory pigments of the zebrafish (Danio rerio), showing the relative positioning of elephant shark opn4m1, opn4m2 and opn4x photopigments (arrow) within the two main clades (m-class (purple) and x-class (blue)) of melanopsin. (A) A Bayesian Probabilistic Inference (BPI) method, performed with a Metropolis Markov chain Monte Carlo (MCMC) algorithm [43], [44] and incorporating a general time-reversal (GTR) model [45] with posterior probability values (represented as a percentage) indicated at the base of each node. (B) Maximum Composite Likelihood (MCL) [47] and (C) Kimura 2-Parameter (K2P) substitution [48] matrix methods, both generating bootstrapped, Neighbour-Joining (NJ) phylogenetic trees [49], with the degree of internal branching expressed as a percentage. The scale bar indicates the number of nucleotide substitutions per site. The human GPR21 (GenBank accession number: NM005294) and GPR52 (GenBank accession number: NM005684) nucleotide sequences were used as outgroups. The opsin sequences and their GenBank accession numbers used for generating the tree are as follows: (i) exorhodopsin (exorh): zebrafish (Danio rerio), NM131212; (ii) rod opsin (rh1): zebrafish (Danio rerio), NM131084 (rh1.1), HM367062 (rh1.2); (iii) rod opsin-like 2 (rh2): zebrafish (Danio rerio), NM131253 (Rh2.1), NM182891 (Rh2.2), NM182892 (Rh2.3), NM131254 (Rh2.4); (iv) short-wavelength-sensitive 2 (sws2): zebrafish (Danio rerio), NM131192; (v) short-wavelength-sensitive 1 (sws1): zebrafish (Danio rerio), NM131319; (vi) long-wavelength-sensitive/middle-wavelength-sensitive (lws/mws): zebrafish (Danio rerio), NM131175 (lws1), NM001002443 (lws2); (vii) vertebrate ancient (va) opsin: zebrafish (Danio rerio), AB035276 (va1), AY996588 (va2); (viii) panopsin (opn3): zebrafish (Danio rerio), NM001111164; (ix) teleost multiple tissue (tmt) opsin: zebrafish (Danio rerio), BC163681; (x) retinal pigment epithelium-specific rhodopsin homolog (rrh) (peropsin): zebrafish (Danio rerio), NM001004654; (xi) retinal G protein-coupled receptor (rgr): zebrafish (Danio rerio), NM001017877; (xii) mammalian-like melanopsin (opn4m): human (Homo sapiens), NM033282 (OPN4V1); cat (Felis catus), AY382594; mouse (Mus musculus), EU303118 (Opn4mlong); rat (Rattus norvegicus), NM138860; hamster (Phodopus sungorus), AY726733; mole-rat (Spalax ehrenbergi), AM748539; dunnart (Sminthopsis crassicaudata), DQ383281; chicken (Gallus gallus), EU124632 (OPN4Mlong); catfish (Ictalurus punctatus), FJ839437 (opn4m1), FJ839438 (opn4m2); roach (Rutilus rutilus), AY226847; cichlid (Astatotilapia burtoni), EU523855; zebrafish (Danio rerio), GQ925715 (opn4m1), GQ925716 (opn4m2), GQ925717 (opn4m3); elephant shark (Callorhinchus milii), JQ172797 (opn4m1), JQ172798 (opn4m2); (xiii) xenopus-like melanopsin (opn4x): chicken (Gallus gallus), EU124630 (OPN4Xlong); lizard (Podarcis siculus), DQ013043; African clawed frog (Xenopus laevis), AF014797; cod (Gadus morhua), AF385823 (opn4xa), AY126448 (opn4xb); zebrafish (Danio rerio), GQ925718 (opn4x1), GQ925719 (opn4x2); elephant shark (Callorhinchus milii), JQ172799 (opn4xlong); (xiv) chordate melanopsin (opn4): lancelet (Branchiostoma belcheri), AB205400; and (xv) outgroup (not shown): human (Homo sapiens), NM005294 (GPR21), NM005684 (GPR52). The gene nomenclature used follows the guidelines adopted by the Entrez Gene database (www.ncbi.nlm.nih.gov/sites/entrez?db=gene). In brief, the genes of all terrestrial species are in uppercase, except for the mouse and rat, where only the first letter is capitalized. The genes of all aquatic species, including amphibians, are in lowercase.
Bayesian phylogenetic tree estimating the relationships between 33 Cetartiodactylia DRA sequences.
Species designations associated with the MHC nomenclature are as follows; Bibo, Bison bonasus (European Bison); Boga, Bos gaurus (Gaur); Boja, Bos javanicus (Banteng); Bubu, Bubalus bubalis (Asian Water Buffalo); Bude, Bubalus depressicornis (Lowland Anoa); Buta, Budorcas taxicolor (Takin); Cahi, Capra hircus, (Domestic Goat); Cafa, Capra falconeri (Markhor); Ceel, Cervus elaphus (Red Deer); Cota, Connochaetes taurinus (Blue Wildebeest); Deca, Delphinus capensis (Common Dolphin); Grgr, Grampus griseus (Risso's Dolphin); Orda, Oryx dammah (Scimitar Horned Oryx); Ovar, Ovis aries (Domestic Sheep); Ovca, Ovis canadensis, (Canadian Bighorn Sheep); Ovda, Ovis dalli (Dalli Sheep); Ovmo, Ovibos moschatus (Musk Ox); Phca, Physeter catodon (Sperm Whale); Ruru, Rupicapra rupicapra (Chamois); Rata, Rangifer tarandus (Reindeer); SLA, Swine Leucocyte Antigen (Pig); Syca, Synserus caffer (African Buffalo); Vipa, Vicugna pacos (Alpaca).
Consensus phylogenetic tree of the NCLDVs.
Bayesian phylogenetic tree was constructed from a cured concatenated alignment of 4 universal NCVOGs (496 conserved positions), including CroV corresponding proteins: primase-helicase (NCVOG0023), DNA polymerase (NCVOG0038), packaging ATPase (NCVOG0249), and A2L-like transcription factor (NCVOG0262). Bayesian posterior probabilities are mentioned near branches as a percentage and are used as confidence values of tree branches. Only probabilities at major nodes are shown. Scale bar represents the number of estimated changes per position for a unit of branch length. Abbreviated names for NCLDVs: b1_Helvi, Heliothis virescens ascovirus 3e; b1_Spofr, Spodoptera frugiperda ascovirus 1a; b1_Trini, Trichoplusia ni ascovirus 2c; c1_Afrsw, African swine fever virus; l1_Aedta, Aedes taeniorhynchus iridescent virus (Invertebrate iridescent virus 3); l2_Invir, Invertebrate iridescent virus 6; l3_Lymch, Lymphocystis disease virus - isolate China; l3_Lymdi, Lymphocystis disease virus 1; l4_Infsp, Infectious spleen and kidney necrosis virus; l5_Ambti, Ambystoma tigrinum virus; l5_Frovi, Frog virus 3; l5_Singr, Singapore grouper iridovirus; m6_Masvi, Marseille virus; q1_Acatu, Acanthocystis turfacea Chlorella virus 1; q1_ParAR, Paramecium bursaria Chlorella virus AR158; q1_Parbu, Paramecium bursaria Chlorella virus 1; q1_ParFR, Paramecium bursaria Chlorella virus FR483; q1_ParMT, Paramecium bursaria chlorella virus MT325; q1_ParNY, Paramecium bursaria Chlorella virus NY2A; q2_Emihu, Emiliania huxleyi virus 86; q3_Ectsi, Ectocarpus siliculosus virus 1; q3_Felsp, Feldmannia species virus; q6_Ostvi, Ostreococcus virus OsV5; u1_Bovpa, Bovine papular stomatitis virus; u1_Canvi, Canarypox virus; u1_Crovi, Crocodilepox virus; u1_Deevi, Deerpox virus W-848-83; u1_Fowvi, Fowlpox virus; u1_Goavi, Goatpox virus Pellor; u1_Lumsk, Lumpy skin disease virus NI-2490; u1_Molco, Molluscum contagiosum virus; u1_Myxvi, Myxoma virus; u1_Orfvi, Orf virus, complete genome; u1_Rabfi, Rabbit fibroma virus; u1_Shevi, Sheeppox virus 17077-99; u1_Swivi, Swinepox virus; u1_Tanvi, Tanapox virus; u1_Vacvi, Vaccinia virus; u1_Varvi, Variola virus (smallpox virus); u1_Yabli, Yaba-like disease virus; u1_Yabmo, Yaba monkey tumor virus; u2_Amsmo, Amsacta moorei entomopoxvirus; u2_Melsa, Melanoplus sanguinipes entomopoxvirus.
Matthew Ikle presents Probabilistic Quantifier Logic for General Intelligence: An Indefinite Probabilities Approach by Matthew Ikle and Ben Goertzel of Novamente
Indefinite Probability approach is a hybrid of Peter Walley's imprecise probability and Bayesian work.
Peter Walley's work is summarized in his book: Statistical Reasoning with Imprecise Probabilities
The topic of this talk, along with a later talk by Ben Goerzel How Might Probabilistic Reasoning Emerge from the Brain? will likely be covered in much more detail in a forthcoming (July, 2008) book Probabilistic Logic Networks: A Comprehensive Framework for Uncertain Inference by Ben Goertzel, Matthew Ikle , Izabela Lyon Freire Goertzel, and Ari Heljakka
in Technical Session # 4 : Reasoning chaired by Steve Omohundro of Self-Aware Systems at the The First Conference on Artificial General Intelligence (AGI-08)
This room is The Zone, at the FedEx Institute of Technology, University of Memphis. It was a very good venue for this conference.
Artificial General Intelligence (AGI) research focuses on the original and ultimate goal of AI -- to create intelligence as a whole, by exploring all available paths, including theoretical and experimental computer science, cognitive science, neuroscience, and innovative interdisciplinary methodologies. AGI is also called Strong AI in the AI community.
Another good reference is Artificial General Intelligence : A Gentle Introduction by Pei Wang
I030208 136